
نام دیگر فیلترتطبیقی فیلتر سازگار یا فیلتر وفقی است.
وقتی مطالعه دربارهٔ فیلترهای سازگار را آغاز می کنیم اهمیت زیادی دارد تا نگاهی دقیق تر به مفهوم دو کلمه اصلی فیلتر و سازگار داشته باشیم. صفت سازگار دربارهٔ سیستم هایی بکار می رود که تلاش آن ها بر وفق دادن رفتار خود نسبت به محیطی است که در آن قرار دارند. به بیان دیگر سیستم هایی سازگار هستند که می کوشند تا با تغییر مقدار پارامترهای خود عملکردشان را به نحوی متناسب با محیط اطراف خود تنظیم کنند. در این فرایند سیستمی که پارامترهای آن دچار تغییرات شده است، فیلتر نام دارد. بر اساس پیچدگی این سیستم یا سرعت عملکرد آن، فیلترهای سازگار گوناگونی وجود دارند که می توانند عملکردی خطی یا غیر خطی داشته باشند.
کلی ترین ساختاری که برای فیلترهای سازگار بکار می رود، ساختار یک فیلتر متقاطع است.
فیلتر سازگار دارای یک سیگنال ورودی و یک سیگنال خروجی است. سیگنالی که علاقه مند هستیم تا خروجی فیلتر مشابه آن تنظیم شود، سیگنال است.
در اینجا دنباله ضرایب، فیلتر است که مقدار دامنه این ضرایب، وزن های فیلتر نامیده می شود و نیز طول فیلتر می باشد و نیز دنباله ای نمونه برداری شده از سیگنال پیوسته ورودی است که دارای ضریب مطابق با تعداد ضرایب فیلتر است. آنچه در طول این فرایند تغییر می کند، دامنه ضرایب فیلتر یا همان وزن های فیلتر است که چگونگی تغییر آن ها بر اساس الگوریتم فیلتر سازگاری می باشد که برای سیستم خاص تعریف خواهد شد.
بر اساس نظریه وینر هاف، با یک رویکرد احتمالی می توان تخمین زد که وزن های بهینه برای فیلتر زمانی بدست می آیند که میانگین مربع خطا به حداقل مقدار خود برسد. در این حالت فیلتر همگرا شده است. آنچه در فیلترهای سازگار اهمیت زیادی دارد این است که بتوان الگوریتمی پیاده کرد که با کمترین پیچیدگی های محاسباتی ریاضی و در حداقل زمان اجرای الگوریتم به مقدار بهینه برسد. زمان اجرای الگوریتم با اندازه گام های حرکت به سمت نقطه بهینه قابل تنظیم است. اندازه گام کوچک باعث افزایش دقت و کاهش خطا می شود و در عین حال سرعت اجرای الگوریتم را نیز کاهش می دهد. انتخاب اندازه گام بزرگ در حالی که سرعت اجرای الگوریتم را زیاد می کند، به همان نسبت نیز خطای همگرایی را افزایش خواهد داد. پس انتخاب اندازه گام مناسب در فیلترهای سازگار امری بسیار مهم و اساسی است. بر اساس همین نظریه الگوریتم حداقل میانگین مربعات شکل گرفت که مبنای احتمالی و آماری براساس یافتن نقطه بهینه داشته و وزن های آن بر این اساس تغییر می یابند. الگوریتم حداقل میانگین مربعات، یکی از کلی ترین و اساسی ترین روش های اصلاح وزن است که به دلیل سادگی در مفهوم و اجرا کاربرد بسیار زیادی در شاخه های گوناگون دیگر از جمله الگوریتم های اصلاح وزن ها در شبکه های عصبی نیز دارد.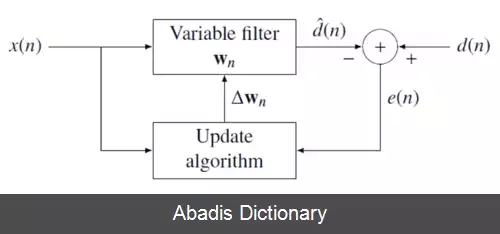
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفوقتی مطالعه دربارهٔ فیلترهای سازگار را آغاز می کنیم اهمیت زیادی دارد تا نگاهی دقیق تر به مفهوم دو کلمه اصلی فیلتر و سازگار داشته باشیم. صفت سازگار دربارهٔ سیستم هایی بکار می رود که تلاش آن ها بر وفق دادن رفتار خود نسبت به محیطی است که در آن قرار دارند. به بیان دیگر سیستم هایی سازگار هستند که می کوشند تا با تغییر مقدار پارامترهای خود عملکردشان را به نحوی متناسب با محیط اطراف خود تنظیم کنند. در این فرایند سیستمی که پارامترهای آن دچار تغییرات شده است، فیلتر نام دارد. بر اساس پیچدگی این سیستم یا سرعت عملکرد آن، فیلترهای سازگار گوناگونی وجود دارند که می توانند عملکردی خطی یا غیر خطی داشته باشند.
کلی ترین ساختاری که برای فیلترهای سازگار بکار می رود، ساختار یک فیلتر متقاطع است.
فیلتر سازگار دارای یک سیگنال ورودی و یک سیگنال خروجی است. سیگنالی که علاقه مند هستیم تا خروجی فیلتر مشابه آن تنظیم شود، سیگنال است.
در اینجا دنباله ضرایب، فیلتر است که مقدار دامنه این ضرایب، وزن های فیلتر نامیده می شود و نیز طول فیلتر می باشد و نیز دنباله ای نمونه برداری شده از سیگنال پیوسته ورودی است که دارای ضریب مطابق با تعداد ضرایب فیلتر است. آنچه در طول این فرایند تغییر می کند، دامنه ضرایب فیلتر یا همان وزن های فیلتر است که چگونگی تغییر آن ها بر اساس الگوریتم فیلتر سازگاری می باشد که برای سیستم خاص تعریف خواهد شد.
بر اساس نظریه وینر هاف، با یک رویکرد احتمالی می توان تخمین زد که وزن های بهینه برای فیلتر زمانی بدست می آیند که میانگین مربع خطا به حداقل مقدار خود برسد. در این حالت فیلتر همگرا شده است. آنچه در فیلترهای سازگار اهمیت زیادی دارد این است که بتوان الگوریتمی پیاده کرد که با کمترین پیچیدگی های محاسباتی ریاضی و در حداقل زمان اجرای الگوریتم به مقدار بهینه برسد. زمان اجرای الگوریتم با اندازه گام های حرکت به سمت نقطه بهینه قابل تنظیم است. اندازه گام کوچک باعث افزایش دقت و کاهش خطا می شود و در عین حال سرعت اجرای الگوریتم را نیز کاهش می دهد. انتخاب اندازه گام بزرگ در حالی که سرعت اجرای الگوریتم را زیاد می کند، به همان نسبت نیز خطای همگرایی را افزایش خواهد داد. پس انتخاب اندازه گام مناسب در فیلترهای سازگار امری بسیار مهم و اساسی است. بر اساس همین نظریه الگوریتم حداقل میانگین مربعات شکل گرفت که مبنای احتمالی و آماری براساس یافتن نقطه بهینه داشته و وزن های آن بر این اساس تغییر می یابند. الگوریتم حداقل میانگین مربعات، یکی از کلی ترین و اساسی ترین روش های اصلاح وزن است که به دلیل سادگی در مفهوم و اجرا کاربرد بسیار زیادی در شاخه های گوناگون دیگر از جمله الگوریتم های اصلاح وزن ها در شبکه های عصبی نیز دارد.

wiki: فیلتر تطبیقی