
سکوی فرود شناور بدون سرنشین ( انگلیسی: Autonomous spaceport drone ship ) ، به اختصار ای اس دی اس ( به انگلیسی:ASDS ) ، یک شناور بدون سرنشین خودکار یا یک سکوی اقیانوس پیمای بوده است که از عرشهٔ یک دوبه یا کرجی تشکیل شده است. این سکو، مجهز به موتورهای تثبیت کنندهٔ موقعیت و یک سکوی فرود بزرگ است که در هنگام انجام فرایند به طور خودکار با استفاده از اطلاعات سامانه موقعیت کنترل می شود.
چنین شناورهایی توسط شرکت فضایی اسپیس ایکس سفارش داده شده اند تا در صورتی که پرتابگرهای فضایی چندبار مصرف این شرکت، پس از خروج از مدار زمین، سوخت کافی برای برگشتن به محل اولیهٔ پرتاب را نداشتند، از این سکوها استفاده کنند. محل فرود این موشک ها در میانهٔ اقیانوس آرام و اقیانوس اطلس است. [ ۱] [ ۲]
اسپیس ایکس دارای سه دوبه یا بارج بدون سرنشین عملیاتی است: ( II ) JRTI و ASOG که از آن ها در اقیانوس اطلس برای پرتاب هایی از مرکز فضایی کندی و پایگاه نیروی هوایی کیپ کاناورال استفاده می شود؛ همچنین OCISLY، در اقیانوس آرام برای پشتیبانی از مأموریت های پایگاه نیروی هوایی وندنبرگ[ ۳] نیز مورد استفاده قرار می گیرد.
JRTI از سال ۲۰۱۶ تا ۲۰۱۹ قبل از خروج از بندر لس آنجلس در آگوست ۲۰۱۹ وظیفهٔ پشتیبانی پرتاب های انجام گرفته از پایگاه نیروی هوایی وندنبرگ، در اقیانوس آرام را برعهده داشت که تمامی آن مأموریت ها موفقیت آمیز بودند.
سکوهای فرودِ شناور، که فاز عملی آن ها در سال ۲۰۱۴ محقق شد، یکی از اجزای عملیاتی مهم و کلیدی در هدف و برنامهٔ اسپیس اکس و ایلان ماسک هستند که برای کاهش قابل توجهِ هزینهٔ خدمات فضایی از این موشک ها استفاده می شود. [ ۴] این سکوهای فرود اسپیس اکس که به مدار زمین ثابت پرتاب می شوند، در صورت عدم امکان بازگشت به محل پرتاب نیازمند فرود در دریا هستند. نیمی از مأموریت های اسپیس ایکس هنگام استفاده از پرتابگرهای چندبار مصرف، در سال ۲۰۱۶ با این روش انجام گرفته اند. [ ۵]
بزرگ ترین چالش در کنترل عملیات این سکوها، خودِ موشک است. اگر به هر دلیلی موشک نتواند دقت کافی برای نشستن صحیح را داشته باشد می بایست به موشک کمک کرد. با توجه به عملکرد موشک، به جای اینکه همیشه دریا و صحرا را بدونِ طوفان تصور کنیم، از ابزارهایی مثل استوانهای گیرندهٔ موشک و بازوهایِ رباتِ دقیق و بسیار قوی هم می شود موشک را با نقص فنی بازنشانی کرد. حتی یک بازوی دقیق، بهتر از موشکی است که ممکن است در برگشت به جو زمین، دقت کافی برای نشستن را نداشته باشد.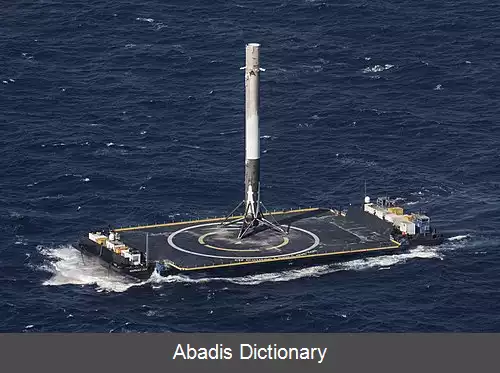
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفچنین شناورهایی توسط شرکت فضایی اسپیس ایکس سفارش داده شده اند تا در صورتی که پرتابگرهای فضایی چندبار مصرف این شرکت، پس از خروج از مدار زمین، سوخت کافی برای برگشتن به محل اولیهٔ پرتاب را نداشتند، از این سکوها استفاده کنند. محل فرود این موشک ها در میانهٔ اقیانوس آرام و اقیانوس اطلس است. [ ۱] [ ۲]
اسپیس ایکس دارای سه دوبه یا بارج بدون سرنشین عملیاتی است: ( II ) JRTI و ASOG که از آن ها در اقیانوس اطلس برای پرتاب هایی از مرکز فضایی کندی و پایگاه نیروی هوایی کیپ کاناورال استفاده می شود؛ همچنین OCISLY، در اقیانوس آرام برای پشتیبانی از مأموریت های پایگاه نیروی هوایی وندنبرگ[ ۳] نیز مورد استفاده قرار می گیرد.
JRTI از سال ۲۰۱۶ تا ۲۰۱۹ قبل از خروج از بندر لس آنجلس در آگوست ۲۰۱۹ وظیفهٔ پشتیبانی پرتاب های انجام گرفته از پایگاه نیروی هوایی وندنبرگ، در اقیانوس آرام را برعهده داشت که تمامی آن مأموریت ها موفقیت آمیز بودند.
سکوهای فرودِ شناور، که فاز عملی آن ها در سال ۲۰۱۴ محقق شد، یکی از اجزای عملیاتی مهم و کلیدی در هدف و برنامهٔ اسپیس اکس و ایلان ماسک هستند که برای کاهش قابل توجهِ هزینهٔ خدمات فضایی از این موشک ها استفاده می شود. [ ۴] این سکوهای فرود اسپیس اکس که به مدار زمین ثابت پرتاب می شوند، در صورت عدم امکان بازگشت به محل پرتاب نیازمند فرود در دریا هستند. نیمی از مأموریت های اسپیس ایکس هنگام استفاده از پرتابگرهای چندبار مصرف، در سال ۲۰۱۶ با این روش انجام گرفته اند. [ ۵]
بزرگ ترین چالش در کنترل عملیات این سکوها، خودِ موشک است. اگر به هر دلیلی موشک نتواند دقت کافی برای نشستن صحیح را داشته باشد می بایست به موشک کمک کرد. با توجه به عملکرد موشک، به جای اینکه همیشه دریا و صحرا را بدونِ طوفان تصور کنیم، از ابزارهایی مثل استوانهای گیرندهٔ موشک و بازوهایِ رباتِ دقیق و بسیار قوی هم می شود موشک را با نقص فنی بازنشانی کرد. حتی یک بازوی دقیق، بهتر از موشکی است که ممکن است در برگشت به جو زمین، دقت کافی برای نشستن را نداشته باشد.
