
تغذیه رو به جلو (کنترل). تغذیه رو به جلو ( انگلیسی: Feed - forward ) عبارت است از توصیف یک عنصر یا مسیر در یک سیستم کنترل که سیگنال کنترلی را از یک منبع در محیط خارجی خود به یک بار دیگر در محیط خارجی خود منتقل می کند که اغلب یک سیگنال فرمان از اپراتور خارجی است. سیستم کنترلی که تغذیه رو به جلو دارد، به سیگنال کنترل خود در روش پیش از تعریف بدون پاسخ، به چگونگی واکنش بار جواب می دهد و در مقایسه با سیستمی عمل می کند که بازخورد دارد، خروجی را برای چگونگی تأثیر بار تنظیم می کند و چگونگی تغییر بار به صورت پیش بینی شده را در نظر می گیرد؛ این بار به محیط خارجی سیستم تعلق دارد. در تغذیه رو به کنترل، تنظیم متغیر کنترلی مبتنی بر خطا نیست در عوض، علم مبتنی بر دانش در مورد فرایند به شکل یک مدل ریاضی و دانش اندازه گیری اختلالات فرایند است.
بعضی از پیش نیازها برای کنترل طرح قابل اعتماد هستند:فرمان خارجی یا سیگنال کنترلی باید در دسترس باشد، و اثر خروجی سیستم بر روی بار باید شناخته شود. گاهی اوقات تغذیه رو به جلو بدون بازخورد «بالستیک» خوانده می شود، زیرا زمانی که سیگنال کنترل ارسال شده است، نمی توان آن را تنظیم کرد؛ هر تنظیم اصلاحی باید به روش یک سیگنال کنترل جدید باشد. در مقابل، «کنترل پرواز» خروجی را در پاسخ به بار تنظیم می کند که با مکانیزم بازخورد مواجه می شود.
این سیستم ها می توانند به نظریه کنترل، فیزیولوژی، یا محاسبات مربوط باشند.
با استفاده از تغذیه رو به جلو، اختلالات سنجیده شده و قبل از اینکه زمان داشته باشند تا بر سیستم تأثیر گذارند مورد بررسی قرار می گیرند. در مثال خانه، یک سیستم تغذیه می تواند بازبودن در را اندازه گیری کند و قبل از آن که خانه خیلی سرد شود، گرم کن به طور خودکار روی بخاری روشن می شود. مشکل تغذیه رو به جلو این است که اثرات آشفتگی بر روی سیستم باید به دقت پیش بینی شود و نباید هیچ یک از اختلالات اندازه گیری شده در این سیستم وجود داشته باشد. به عنوان مثال، اگر یک پنجره باز باشد، اندازه گیری نمی شود و ترموستات کنترل به جلو ممکن است اجازه خنک شدن خانه را بدهد. این عبارت معنای خاصی در زمینه کنترل خودکار مبتنی بر CPU دارد. نظم و انضباط «کنترل تغذیه رو به جلو» به طور گسترده ای مورد بحث قرار می گیرد، اما به ندرت به دلیل دشواری و هزینه توسعه یا ارائه مدل ریاضی مورد نیاز برای تسهیل این نوع کنترل انجام می شود. سامانه کنترل حلقه باز و کنترل بازخورد، که اغلب بر پایه الگوریتم های کنترل PID هستند، به طور گسترده ای مورد استفاده قرار می گیرند.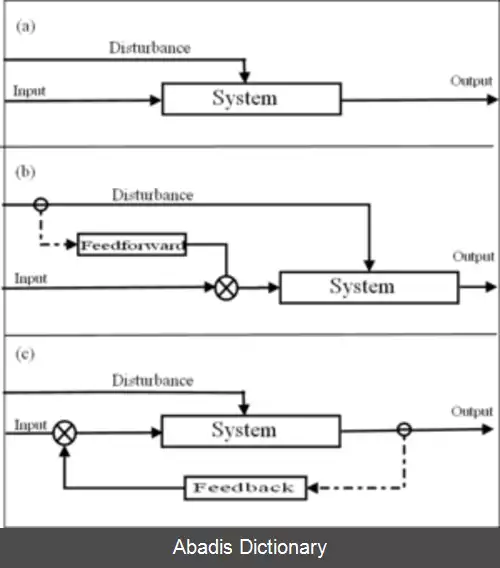
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفبعضی از پیش نیازها برای کنترل طرح قابل اعتماد هستند:فرمان خارجی یا سیگنال کنترلی باید در دسترس باشد، و اثر خروجی سیستم بر روی بار باید شناخته شود. گاهی اوقات تغذیه رو به جلو بدون بازخورد «بالستیک» خوانده می شود، زیرا زمانی که سیگنال کنترل ارسال شده است، نمی توان آن را تنظیم کرد؛ هر تنظیم اصلاحی باید به روش یک سیگنال کنترل جدید باشد. در مقابل، «کنترل پرواز» خروجی را در پاسخ به بار تنظیم می کند که با مکانیزم بازخورد مواجه می شود.
این سیستم ها می توانند به نظریه کنترل، فیزیولوژی، یا محاسبات مربوط باشند.
با استفاده از تغذیه رو به جلو، اختلالات سنجیده شده و قبل از اینکه زمان داشته باشند تا بر سیستم تأثیر گذارند مورد بررسی قرار می گیرند. در مثال خانه، یک سیستم تغذیه می تواند بازبودن در را اندازه گیری کند و قبل از آن که خانه خیلی سرد شود، گرم کن به طور خودکار روی بخاری روشن می شود. مشکل تغذیه رو به جلو این است که اثرات آشفتگی بر روی سیستم باید به دقت پیش بینی شود و نباید هیچ یک از اختلالات اندازه گیری شده در این سیستم وجود داشته باشد. به عنوان مثال، اگر یک پنجره باز باشد، اندازه گیری نمی شود و ترموستات کنترل به جلو ممکن است اجازه خنک شدن خانه را بدهد. این عبارت معنای خاصی در زمینه کنترل خودکار مبتنی بر CPU دارد. نظم و انضباط «کنترل تغذیه رو به جلو» به طور گسترده ای مورد بحث قرار می گیرد، اما به ندرت به دلیل دشواری و هزینه توسعه یا ارائه مدل ریاضی مورد نیاز برای تسهیل این نوع کنترل انجام می شود. سامانه کنترل حلقه باز و کنترل بازخورد، که اغلب بر پایه الگوریتم های کنترل PID هستند، به طور گسترده ای مورد استفاده قرار می گیرند.

wiki: تغذیه رو به جلو (کنترل)