
کنترل کننده پی آی دی. کنترل کننده پی آی دی ( به انگلیسی: proportional–integral–derivative controller ( PID controller ) ) از رایج ترین نمونه های الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC، کنترل فشار، کنترل دما و… کاربرد دارد. کنترل کننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب ( setpoint ) محاسبه می کند. هدف کنترل کننده، به حداقل رساندن خطا با تنظیم ورودی های کنترل فرایند است.
PID از سه قسمت مجزا به نام های Proportional ( تناسبی ) ، Integral ( انتگرال گیر ) و Derivative ( مشتق گیر ) تشکیل شده که هر کدام از آن ها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام می دهند و در نهایت خروجی شان با هم جمع می شود. خروجی این مجموعه که همان خروجی کنترل کننده PID است برای اصلاح خطا ( error ) به سیستم فرستاده می شود.
فرمول استاندارد PID به فرم زیر است:
بنابراین تابع تبدیل یک کنترل کننده PID به صورت زیر درمی آید:
G c = K p + K i s + K d s
در بسیاری از کنترل کننده ها به علت حساسیت عبارتِ مشتق نسبت به نویز و دشواری اجرا، از آن صرف نظر و کنترل را به صورت PI پیاده سازی می کنند. سیگنال u ( t ) ( خروجی PID ) بر اساس نسبتی از خطای کنونی سیستم ( عملکرد حاضر ) ، به اضافه مجموع خطاهای سیستم ( رفتار گذشته ) ، به اضافه مشتق خطای کنونی ( تخمین خطی رفتار آینده ) محاسبه می شود و برای اصلاح خطا به سیستم اعمال می گردد. ضرایب K ، T i و T d نیز می توانند با روش های شناخته شده ای مانند تابع انتقال به صورت بهینه محاسبه شوند، اگرچه در کاربردهای عملی، به طور رضایت بخش می توانند با آزمون و خطا و مشاهده رفتار سیستم به طور تقریبی تعیین گردند.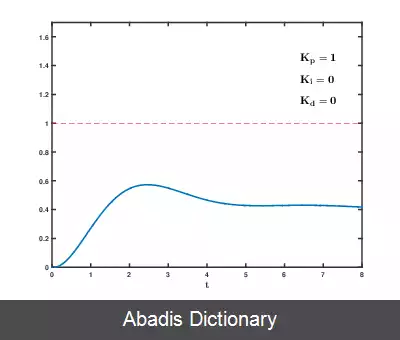
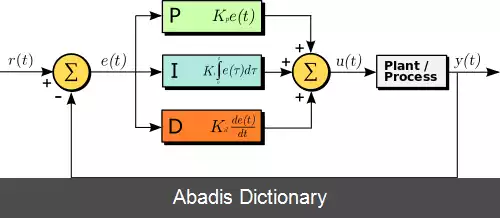
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفPID از سه قسمت مجزا به نام های Proportional ( تناسبی ) ، Integral ( انتگرال گیر ) و Derivative ( مشتق گیر ) تشکیل شده که هر کدام از آن ها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام می دهند و در نهایت خروجی شان با هم جمع می شود. خروجی این مجموعه که همان خروجی کنترل کننده PID است برای اصلاح خطا ( error ) به سیستم فرستاده می شود.
فرمول استاندارد PID به فرم زیر است:
بنابراین تابع تبدیل یک کنترل کننده PID به صورت زیر درمی آید:
G c = K p + K i s + K d s
در بسیاری از کنترل کننده ها به علت حساسیت عبارتِ مشتق نسبت به نویز و دشواری اجرا، از آن صرف نظر و کنترل را به صورت PI پیاده سازی می کنند. سیگنال u ( t ) ( خروجی PID ) بر اساس نسبتی از خطای کنونی سیستم ( عملکرد حاضر ) ، به اضافه مجموع خطاهای سیستم ( رفتار گذشته ) ، به اضافه مشتق خطای کنونی ( تخمین خطی رفتار آینده ) محاسبه می شود و برای اصلاح خطا به سیستم اعمال می گردد. ضرایب K ، T i و T d نیز می توانند با روش های شناخته شده ای مانند تابع انتقال به صورت بهینه محاسبه شوند، اگرچه در کاربردهای عملی، به طور رضایت بخش می توانند با آزمون و خطا و مشاهده رفتار سیستم به طور تقریبی تعیین گردند.


wiki: کنترل کننده پی آی دی