
پلیمرهای الکترواکتیو ( به انگلیسی: ElectroActive polymers ) ، یا EAPها، پلیمرهایی هستند که هنگام تحریک توسط یک میدان الکتریکی، تغییر اندازه یا شکل را نشان می دهند. متداول ترین کاربردهای این نوع مواد در عملگر مکانیکی[ ۱] و سنسورها است. [ ۲] [ ۳] یکی از ویژگی های بارز EAP این است که آن ها در حالیکه نیروهای زیادی را تحمل می کنند، دچار تغییر شکل زیادی می شوند. اکثر عملگرهای مکانیکی در گذشته از مواد پیزوالکتریک سرامیکی ساخته شده اند. در حالی که این مواد قادر به مقاومت در برابر نیروهای بزرگ هستند، اما معمولاً فقط کسری از درصد را تغییر می دهند. در اواخر دهه ۱۹۹۰، نشان داده شده است که بعضی از EAPها می توانند تا ۳۸۰٪ کرنش از خود نشان دهند، که این بسیار بیشتر از سایر عملگرهای مکانیکی سرامیکی است. [ ۱] یکی از رایج ترین کاربردهای EAP در زمینه رباتیک در توسعه ماهیچه های مصنوعی است؛ بنابراین، اغلب از یک پلیمرالکترواکتیو به عنوان یک ماهیچه مصنوعی یاد می شود.
زمینه EAPs در سال ۱۸۸۰ پدیدار شد، هنگامی که ویلهلم رونتگن آزمایشی را طراحی کرد که در آن وی تأثیر میدان الکترواستاتیک را بر روی خواص مکانیکی یک نوار از لاستیک طبیعی آزمایش کرد. [ ۴] نوار لاستیکی در یک انتها ثابت بوده و در طرف دیگر به یک توده وصل شده است سپس بارهای الکتریکی روی لاستیک پاشیده شدند و مشاهده شد که طول تغییر کرده است. در سال ۱۹۲۵ بود که اولین پلیمر پیزوالکتریک کشف شد ( الکترلت - Electret ) . الکترلت با ترکیب موم کارنابا، گلاب و موم زنبورعسل تشکیل شده و سپس در حالی که تحت اعمال جریان الکتریکی مستقیم DC قرار دارد محلول خنک می شود. این مخلوط سپس به یک ماده پلیمری که اثر پیزوالکتریک دارد، جامد می شود.
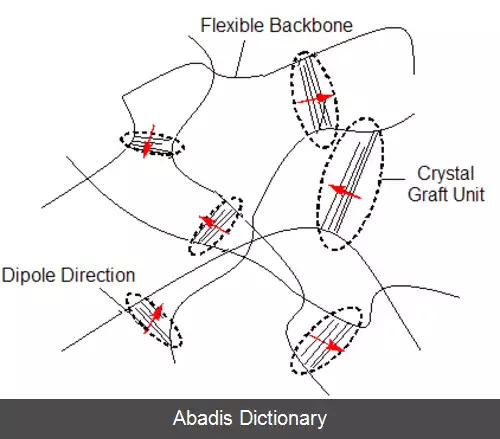
پلیمرهایی که به شرایط محیطی پاسخ می دهند، غیر از جریان الکتریکی اعمالی، نیز بخش بزرگی از این حوزه مطالعه بوده است. در سال ۱۹۴۹، کاتچالسکی و همکارانش نشان دادند که وقتی رشته های کلاژن در محلول های اسید یا قلیایی فرومی روند، آنها با تغییر در حجم پاسخ می دهند. [ ۵] رشته های کلاژن در یک محلول اسیدی انبساط یافته و در یک محلول قلیایی منقبض می شوند. اگرچه محرک های دیگری ( مانند pH ) مورد بررسی قرار گرفته است، به دلیل سهولت و عملی بودن آن، بیشتر تحقیقات به ساخت پلیمرهایی که به منظور تقلید از سیستم های بیولوژیکی به محرک های الکتریکی پاسخ می دهند اختصاص داده شده است. موفقیت بزرگ بعدی در EAPs در اواخر دهه ۱۹۶۰ رخ داد. در سال ۱۹۶۹ کاوای نشان داد که پلی وینیلیدن فلورید ( PVDF ) اثر پیزوالکتریک بزرگی را به نمایش می گذارد. [ ۵] این علاقه تحقیق به توسعه سیستم های دیگر پلیمرها که اثر مشابهی را نشان می دهند، دامن زد. در سال ۱۹۷۷ اولین پلیمرهای رسانا توسط هیدکی شیریکاوا و همکارانش کشف شد. [ ۶] شیریکاوا به همراه آلن مک دیرمید و آلن هیگر نشان دادند که پلی استیلن از نظر الکتریکی رسانا است و با دوپینگ آن با بخار ید، می توانند هدایت آن را با ۸ مرتبه از شدت افزایش دهند؛ بنابراین رسانایی نزدیک به فلز بود. در اواخر دهه ۱۹۸۰ تعدادی از پلیمرهای دیگر نشان دادند که اثر پیزوالکتریک دارند یا رسانا شده اند. در اوایل دهه ۱۹۹۰، کامپوزیت های پلیمری فلزی یونی ( IPMC ) توسعه داده شدند و نشان دادند که دارای خواص الکتروشیمیایی به مراتب برتر از EAPهای قبلی هستند. مهمترین مزیت IPMC این بود که آنها قادر به فعالسازی ( تغییر شکل ) در ولتاژهای کم ۱ یا ۲ ولت بودند. [ ۵] این دستورات قدر کمتر از هر EAP قبلی است. نه تنها انرژی فعالسازی برای این مواد بسیار پایین تر بود بلکه آنها نیز می توانند دچار تغییر شکل بسیار بزرگتری شوند. IPMC نشان داد که در هر نقطه تا ۳۸۰٪ کرنش، با بزرگی، بزرگتر از EAPهای قبلی توسعه یافته به نمایش بگذارند. [ ۱] در سال ۱۹۹۹، یوسف بار کوهن پیشنهاد بازی مچ اندازی از بازوی رباتیک EAP علیه چالش انسانی را ارائه داد. [ ۵] این چالشی بود که طی آن گروه های تحقیقاتی در سراسر جهان برای طراحی بازوی روباتی متشکل از عضلات EAP که می توانست یک انسان را در یک مسابقه مچ اندازی شکست دهد، رقابت کردند. اولین چالش در کنفرانس فعالان و ابزارهای الکترومغناطیسی پلیمر در سال ۲۰۰۵ برگزار شد. [ ۵] نقطه عطف اصلی دیگر در این زمینه این است که اولین وسیله تجاری توسعه یافته شامل EAPs به عنوان عضله مصنوعی در سال ۲۰۰۲ توسط Eamex در ژاپن تولید شد. [ ۱] این وسیله یک ماهی بود که قادر به شنا کردن به تنهایی بود و دُم خود را با استفاده از عضله EAP حرکت می داد. اما توسعه در پیشرفت عملی رضایت بخش نبوده است. [ ۷] تحقیقات تأمین شده توسط دارپا ( آژانس پروژه های تحقیقاتی پیشرفته دفاعی ) در دهه ۱۹۹۰ در اس آرآی اینترنشنال و به رهبری ران پلراین با استفاده از پلیمرهای سیلیکون و اکریلیک، پلیمرالکتروواکتیو را ساخت. این فناوری در سال ۲۰۰۳ به شرکت Artificial Muscle وارد شد و تولید صنعتی در سال ۲۰۰۸ آغاز شد. [ ۸] در سال ۲۰۱۰، ماهیچه مصنوعی به عنوان یک شرکت تابعه کووسترو درآمد. [ ۹]
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفزمینه EAPs در سال ۱۸۸۰ پدیدار شد، هنگامی که ویلهلم رونتگن آزمایشی را طراحی کرد که در آن وی تأثیر میدان الکترواستاتیک را بر روی خواص مکانیکی یک نوار از لاستیک طبیعی آزمایش کرد. [ ۴] نوار لاستیکی در یک انتها ثابت بوده و در طرف دیگر به یک توده وصل شده است سپس بارهای الکتریکی روی لاستیک پاشیده شدند و مشاهده شد که طول تغییر کرده است. در سال ۱۹۲۵ بود که اولین پلیمر پیزوالکتریک کشف شد ( الکترلت - Electret ) . الکترلت با ترکیب موم کارنابا، گلاب و موم زنبورعسل تشکیل شده و سپس در حالی که تحت اعمال جریان الکتریکی مستقیم DC قرار دارد محلول خنک می شود. این مخلوط سپس به یک ماده پلیمری که اثر پیزوالکتریک دارد، جامد می شود.
پلیمرهایی که به شرایط محیطی پاسخ می دهند، غیر از جریان الکتریکی اعمالی، نیز بخش بزرگی از این حوزه مطالعه بوده است. در سال ۱۹۴۹، کاتچالسکی و همکارانش نشان دادند که وقتی رشته های کلاژن در محلول های اسید یا قلیایی فرومی روند، آنها با تغییر در حجم پاسخ می دهند. [ ۵] رشته های کلاژن در یک محلول اسیدی انبساط یافته و در یک محلول قلیایی منقبض می شوند. اگرچه محرک های دیگری ( مانند pH ) مورد بررسی قرار گرفته است، به دلیل سهولت و عملی بودن آن، بیشتر تحقیقات به ساخت پلیمرهایی که به منظور تقلید از سیستم های بیولوژیکی به محرک های الکتریکی پاسخ می دهند اختصاص داده شده است. موفقیت بزرگ بعدی در EAPs در اواخر دهه ۱۹۶۰ رخ داد. در سال ۱۹۶۹ کاوای نشان داد که پلی وینیلیدن فلورید ( PVDF ) اثر پیزوالکتریک بزرگی را به نمایش می گذارد. [ ۵] این علاقه تحقیق به توسعه سیستم های دیگر پلیمرها که اثر مشابهی را نشان می دهند، دامن زد. در سال ۱۹۷۷ اولین پلیمرهای رسانا توسط هیدکی شیریکاوا و همکارانش کشف شد. [ ۶] شیریکاوا به همراه آلن مک دیرمید و آلن هیگر نشان دادند که پلی استیلن از نظر الکتریکی رسانا است و با دوپینگ آن با بخار ید، می توانند هدایت آن را با ۸ مرتبه از شدت افزایش دهند؛ بنابراین رسانایی نزدیک به فلز بود. در اواخر دهه ۱۹۸۰ تعدادی از پلیمرهای دیگر نشان دادند که اثر پیزوالکتریک دارند یا رسانا شده اند. در اوایل دهه ۱۹۹۰، کامپوزیت های پلیمری فلزی یونی ( IPMC ) توسعه داده شدند و نشان دادند که دارای خواص الکتروشیمیایی به مراتب برتر از EAPهای قبلی هستند. مهمترین مزیت IPMC این بود که آنها قادر به فعالسازی ( تغییر شکل ) در ولتاژهای کم ۱ یا ۲ ولت بودند. [ ۵] این دستورات قدر کمتر از هر EAP قبلی است. نه تنها انرژی فعالسازی برای این مواد بسیار پایین تر بود بلکه آنها نیز می توانند دچار تغییر شکل بسیار بزرگتری شوند. IPMC نشان داد که در هر نقطه تا ۳۸۰٪ کرنش، با بزرگی، بزرگتر از EAPهای قبلی توسعه یافته به نمایش بگذارند. [ ۱] در سال ۱۹۹۹، یوسف بار کوهن پیشنهاد بازی مچ اندازی از بازوی رباتیک EAP علیه چالش انسانی را ارائه داد. [ ۵] این چالشی بود که طی آن گروه های تحقیقاتی در سراسر جهان برای طراحی بازوی روباتی متشکل از عضلات EAP که می توانست یک انسان را در یک مسابقه مچ اندازی شکست دهد، رقابت کردند. اولین چالش در کنفرانس فعالان و ابزارهای الکترومغناطیسی پلیمر در سال ۲۰۰۵ برگزار شد. [ ۵] نقطه عطف اصلی دیگر در این زمینه این است که اولین وسیله تجاری توسعه یافته شامل EAPs به عنوان عضله مصنوعی در سال ۲۰۰۲ توسط Eamex در ژاپن تولید شد. [ ۱] این وسیله یک ماهی بود که قادر به شنا کردن به تنهایی بود و دُم خود را با استفاده از عضله EAP حرکت می داد. اما توسعه در پیشرفت عملی رضایت بخش نبوده است. [ ۷] تحقیقات تأمین شده توسط دارپا ( آژانس پروژه های تحقیقاتی پیشرفته دفاعی ) در دهه ۱۹۹۰ در اس آرآی اینترنشنال و به رهبری ران پلراین با استفاده از پلیمرهای سیلیکون و اکریلیک، پلیمرالکتروواکتیو را ساخت. این فناوری در سال ۲۰۰۳ به شرکت Artificial Muscle وارد شد و تولید صنعتی در سال ۲۰۰۸ آغاز شد. [ ۸] در سال ۲۰۱۰، ماهیچه مصنوعی به عنوان یک شرکت تابعه کووسترو درآمد. [ ۹]






wiki: پلیمر الکترواکتیو