
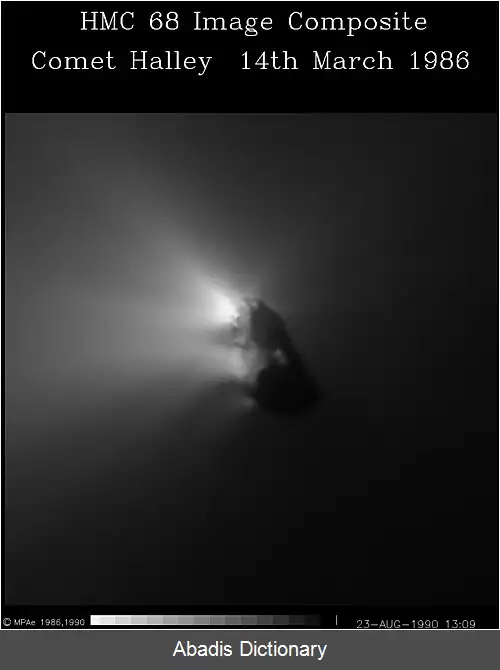
جیوتو یک مأموریت فضاپیمای رباتیک اروپایی از آژانس فضایی اروپا بود. این فضاپیما برای مطالعه ستاره دنباله دار هالی پرواز کرد و با این کار اولین فضاپیمایی شد که مشاهدات یک ستاره دنباله دار را از نزدیک رصد کرده است. در ۱۳ مارس ۱۹۸۶، این فضاپیما موفق شد در فاصله ۵۹۶ کیلومتری به هسته هالی نزدیک شود. نام این فضاپیما از اسم نقاش دوران رنسانس ایتالیا، جوتو دی بوندونه گرفته شده است. وی در سال ۱۳۰۱ ستاره دنباله دار هالی را مشاهده کرده بود و از آن الهام گرفته بود تا ستاره بیت اللحم را در نقاشی خود در نیایش مغان به تصویر بکشد.
در ابتدا این کاوشگر بعنوان شریک ایالات متحده برنامه ریزی شده بود که جیوتو را همراهی می کرد، اما این امر به دلیل کاهش بودجه در ناسا به نتیجه نرسید. قرار بود در زمان پرواز جیوتو تجهیزات رصد بر روی یک شاتل فضایی در مدار زمین خاکی وجود داشته باشد، اما آنها به نوبه خود با فاجعه چلنجر سقوط کردند.
این طرح سپس به یک آرمادا تعاونی از پنج فضاپیما از جمله جیوتو تبدیل شد، دو نفر از برنامه وگا اتحاد جماهیر شوروی و دو مورد از ژاپن: کاوشگرهای ساکیگاک و فضاپیمای < i id="mwLw"> سوئیس< /i> . این ایده برای کاوشگرهای ژاپنی و کاوشگر قبلی آمریکا ( International Commerce Explorer International ) بود که مسافت های طولانی را انجام دادند و پس از آن وگاس روسی که هسته را پیدا کرد، و اطلاعات حاصل از ارسال به این وسیله به جیوتو اجازه می داد تا دقیقاً بسیار نزدیک به هسته باشد. . از آنجا که جیوتو بسیار نزدیک به هسته ESA می گذرد، اکثراً متقاعد شده بود که به دلیل برخورد فضاپیما با سرعت بسیار زیاد با بسیاری از ذرات گرد و غبار موجود از ستاره دنباله دار، درگیری از بین نمی رود. گروه هماهنگ شده کاوشگرها به عنوان هالی آرمادا شناخته شدند.
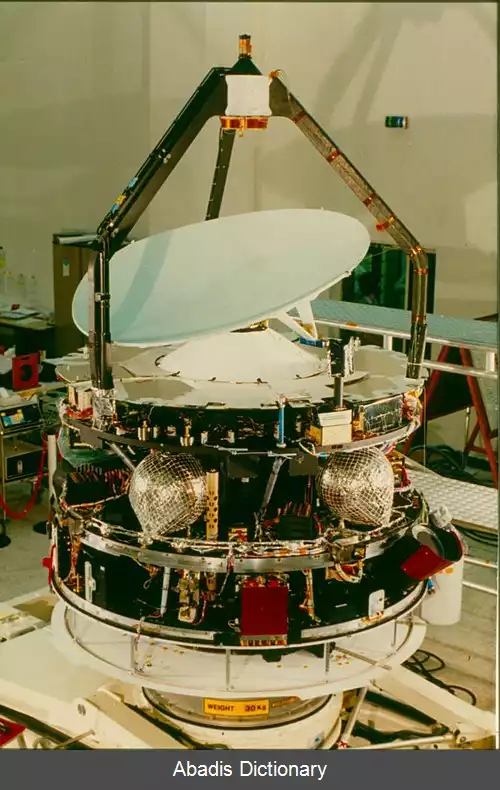
این فضاپیما از ماهواره تحقیقاتی GEOS ساخته شده توسط فضانوردی انگلستان در فیلتون، بیرستول ساخته شده است و با افزودن یک سپر گرد و غبار ( سپر ویپپل ) ، همان طور که توسط فرد ویپل پیشنهاد شده است، اصلاح شده است.
این مأموریت در سال ۱۹۸۰ توسط ESA تدارک دیده شد و در ۲ ژوئیه ۱۹۸۵ توسط موشک آریان ۱ ( پرواز V14 ) از کورو، گویان فرانسه به فضا پرتاب شد. مرکز کنترل آژانس فضایی اروپا در دارستاد ( آلمان غربی ) در ابتدا در مدار زمین ثابت انتقال ( GTO ) و سپس در نزدیکی زمین ( NEP ) قبل از فاز طولانی مسافرت کنترل می شد. در حالی که در GTO تعدادی از کشت و چرخش مانور ( تا ۹۰ دور در دقیقه ) در آماده سازی برای شلیک از تقویت اوج موتور ( ABM ) ، انجام هر چند گردش دایره ای مدار شد مدار ثابت از ABM برای جیوتو در اخراج شد تعیین و کنترل نگرش از داده های سنسور پالس خورشید و زمین در تله متر برای تعیین جهت گیری فضاپیما استفاده می کند.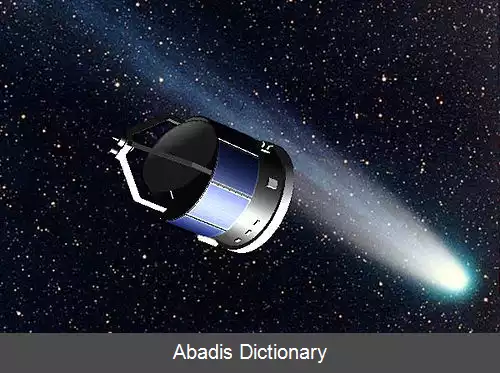

این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفدر ابتدا این کاوشگر بعنوان شریک ایالات متحده برنامه ریزی شده بود که جیوتو را همراهی می کرد، اما این امر به دلیل کاهش بودجه در ناسا به نتیجه نرسید. قرار بود در زمان پرواز جیوتو تجهیزات رصد بر روی یک شاتل فضایی در مدار زمین خاکی وجود داشته باشد، اما آنها به نوبه خود با فاجعه چلنجر سقوط کردند.
این طرح سپس به یک آرمادا تعاونی از پنج فضاپیما از جمله جیوتو تبدیل شد، دو نفر از برنامه وگا اتحاد جماهیر شوروی و دو مورد از ژاپن: کاوشگرهای ساکیگاک و فضاپیمای < i id="mwLw"> سوئیس< /i> . این ایده برای کاوشگرهای ژاپنی و کاوشگر قبلی آمریکا ( International Commerce Explorer International ) بود که مسافت های طولانی را انجام دادند و پس از آن وگاس روسی که هسته را پیدا کرد، و اطلاعات حاصل از ارسال به این وسیله به جیوتو اجازه می داد تا دقیقاً بسیار نزدیک به هسته باشد. . از آنجا که جیوتو بسیار نزدیک به هسته ESA می گذرد، اکثراً متقاعد شده بود که به دلیل برخورد فضاپیما با سرعت بسیار زیاد با بسیاری از ذرات گرد و غبار موجود از ستاره دنباله دار، درگیری از بین نمی رود. گروه هماهنگ شده کاوشگرها به عنوان هالی آرمادا شناخته شدند.
این فضاپیما از ماهواره تحقیقاتی GEOS ساخته شده توسط فضانوردی انگلستان در فیلتون، بیرستول ساخته شده است و با افزودن یک سپر گرد و غبار ( سپر ویپپل ) ، همان طور که توسط فرد ویپل پیشنهاد شده است، اصلاح شده است.
این مأموریت در سال ۱۹۸۰ توسط ESA تدارک دیده شد و در ۲ ژوئیه ۱۹۸۵ توسط موشک آریان ۱ ( پرواز V14 ) از کورو، گویان فرانسه به فضا پرتاب شد. مرکز کنترل آژانس فضایی اروپا در دارستاد ( آلمان غربی ) در ابتدا در مدار زمین ثابت انتقال ( GTO ) و سپس در نزدیکی زمین ( NEP ) قبل از فاز طولانی مسافرت کنترل می شد. در حالی که در GTO تعدادی از کشت و چرخش مانور ( تا ۹۰ دور در دقیقه ) در آماده سازی برای شلیک از تقویت اوج موتور ( ABM ) ، انجام هر چند گردش دایره ای مدار شد مدار ثابت از ABM برای جیوتو در اخراج شد تعیین و کنترل نگرش از داده های سنسور پالس خورشید و زمین در تله متر برای تعیین جهت گیری فضاپیما استفاده می کند.





wiki: فضاپیمای جیوتو