
رابط مکانیکی ( به انگلیسی: Mechanical linkage ) مجموعه ای از اجسامی است که برای مدیریت نیروها و حرکات به یکدیگر متصل می شوند. حرکت یک جسم یا رابط، به کمک علم هندسه مورد مطالعه قرار می گیرد، به همین دلیل رابط ها را صلب در نظر می گیرند. [ ۱] اتصالات بین لینک ها به صورت حرکت ایدئال مدل می شوند، برای مثال دوران خالص یا حرکت کشویی، و اتصال ( Joint ) نامیده می شوند. رابطی که به شکل یک شبکه از اتصالات صلب و مفصل های ایدئال مدل شده است را یک زنجیره سینماتیکی می نامند.
اتصالات ممکن است از زنجیرهای باز، زنجیرهای بسته یا ترکیبی از زنجیر باز و بسته ساخته شوند. هر پیوند در یک زنجیره با یک اتصال به یک یا چند لینک دیگر متصل می شود؛ بنابراین، یک زنجیره سینماتیک را می توان به عنوان یک گراف که در آن رابط ها مسیر هستند و اتصال ها رأس هستند، مدل سازی کرد که به عنوان گراف رابط نامیده می شود.
حرکت اتصال ایدئال به طور کلی با یک زیر گروه از جابجایی های اقلیدسی مرتبط است. تعداد پارامترهای موجود در زیرگروه درجه آزادی ( DOF ) اتصال نامیده می شود. رابط های مکانیکی معمولاً برای تبدیل نیرو و حرکت ورودی داده شده به یک نیرو و حرکت خروجی مورد نظر طراحی می شوند. نسبت نیروی خروجی به نیروی ورودی به عنوان مزیت مکانیکی اتصال شناخته می شود، در حالی که نسبت سرعت ورودی به سرعت خروجی به عنوان نسبت سرعت شناخته می شود. نسبت سرعت و مزایای مکانیکی طوری تعریف می شوند، به طوری که آنها یک عدد مشابه را در اتصال ایدئال تولید می کنند.
زنجیره سینماتیکی که در آن حداقل یک رابط در جای خود ثابت باشد، مکانیسم نامیده می شود و رابطی که برای ثابت بودن طراحی شده باشد سازه نامیده می شود.
اهرم شاید یکی از ساده ترین رابط های مکانیکی موجود در دنیا باشد، که یک رابط است که حول یک تکیه گاه که بر روی زمین ثابت است دوران می کند. اگر دو اهرم توسط یک میله طوری به یکدیگر متصل شوند که نیروی وارده به یکی، به دیگری نیز منتقل شود، رابط چهارمیله ای شکل می گیرد. به این میله ها لنگ ( Crank ) و به تکیه گاه ها محور ( لولا ) گفته می شود. میل رابط ( شاتون ) ( connecting rod ) کوپلر نیز خوانده می شود.
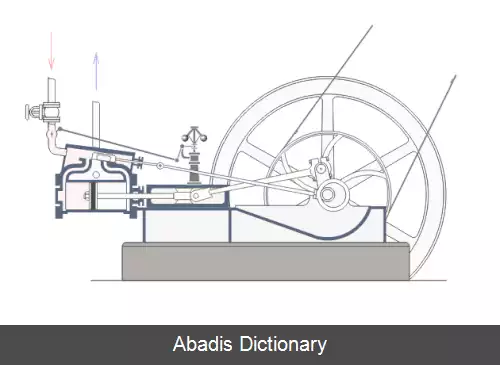
رابط های مکانیکی ( Linkage ) از اجزای اصلی ماشین ها و ابزارها هستند. مثال های آن از رابط های مکانیکی ساده ای مانند انبردست و مثال هایی پیچیده ای مانند اجزای روباتیک می باشد. یکی از معروف ترین رابط های مکانیکی چهارمیله ای، موتور احتراق داخلی پیستونی می باشد.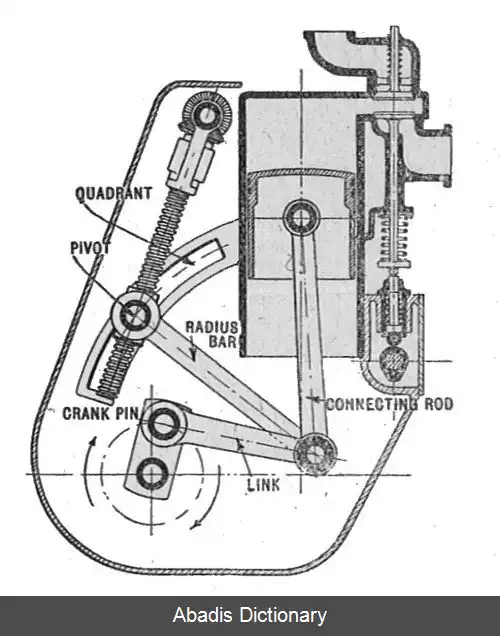
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفاتصالات ممکن است از زنجیرهای باز، زنجیرهای بسته یا ترکیبی از زنجیر باز و بسته ساخته شوند. هر پیوند در یک زنجیره با یک اتصال به یک یا چند لینک دیگر متصل می شود؛ بنابراین، یک زنجیره سینماتیک را می توان به عنوان یک گراف که در آن رابط ها مسیر هستند و اتصال ها رأس هستند، مدل سازی کرد که به عنوان گراف رابط نامیده می شود.
حرکت اتصال ایدئال به طور کلی با یک زیر گروه از جابجایی های اقلیدسی مرتبط است. تعداد پارامترهای موجود در زیرگروه درجه آزادی ( DOF ) اتصال نامیده می شود. رابط های مکانیکی معمولاً برای تبدیل نیرو و حرکت ورودی داده شده به یک نیرو و حرکت خروجی مورد نظر طراحی می شوند. نسبت نیروی خروجی به نیروی ورودی به عنوان مزیت مکانیکی اتصال شناخته می شود، در حالی که نسبت سرعت ورودی به سرعت خروجی به عنوان نسبت سرعت شناخته می شود. نسبت سرعت و مزایای مکانیکی طوری تعریف می شوند، به طوری که آنها یک عدد مشابه را در اتصال ایدئال تولید می کنند.
زنجیره سینماتیکی که در آن حداقل یک رابط در جای خود ثابت باشد، مکانیسم نامیده می شود و رابطی که برای ثابت بودن طراحی شده باشد سازه نامیده می شود.
اهرم شاید یکی از ساده ترین رابط های مکانیکی موجود در دنیا باشد، که یک رابط است که حول یک تکیه گاه که بر روی زمین ثابت است دوران می کند. اگر دو اهرم توسط یک میله طوری به یکدیگر متصل شوند که نیروی وارده به یکی، به دیگری نیز منتقل شود، رابط چهارمیله ای شکل می گیرد. به این میله ها لنگ ( Crank ) و به تکیه گاه ها محور ( لولا ) گفته می شود. میل رابط ( شاتون ) ( connecting rod ) کوپلر نیز خوانده می شود.
رابط های مکانیکی ( Linkage ) از اجزای اصلی ماشین ها و ابزارها هستند. مثال های آن از رابط های مکانیکی ساده ای مانند انبردست و مثال هایی پیچیده ای مانند اجزای روباتیک می باشد. یکی از معروف ترین رابط های مکانیکی چهارمیله ای، موتور احتراق داخلی پیستونی می باشد.






wiki: رابط مکانیکی