
درخت رفتار (هوش مصنوعی رباتیک و کنترل). درخت رفتار یک مدل ریاضیاتی از اجرای نقشه و طرح است که در علوم کامپیوتر ، رباتیک ، سیستم های کنترل و بازی های ویدیویی استفاده می شود. آن ها جابجایی های بین یک مجموعه محدود از وظایف را به روش مدولار توصیف می کنند. قدرت آنها از قابلیت آنها در ایجاد وظایف بسیار پیچیده که متشکل از کارهای ساده میباشد، ناشی می شود بدون اینکه از نحوه اجرای وظایف ساده نگران باشند . درختان رفتار شباهت هایی با ماشین های حالات متناهی دارند با این تفاوت اساسی که عنصر اصلی سازنده یک رفتار، یک وظیفه میباشد، نه یک حالت. درک ساده ی انسان باعث می شود که درختان رفتار ، کمتر دچار خطا شوند و در جامعه توسعه دهندگان بازی بسیار محبوب باشند. همچنین درختان رفتار چندین معماری کنترل دیگر را تعمیم می دهند. از نظر ریاضی ، آنها گراف جهتدار غیرمدور به حساب می آیند.
درختان رفتار از صنعت بازی های رایانه ای به عنوان ابزاری قدرتمند برای مدل سازی رفتار شخصیت های غیرقابل بازی ( NPC ) نشات گرفته اند. آنها به طور گسترده ای در بازی های ویدیویی رده بالا مانند Halo ، Bioshock و Spore مورد استفاده قرار گرفته اند . فعالیت ها و پژوهش های اخیر ، درختان رفتار را به عنوان یک چارچوب کنترل چند مأموریتی برای پهپاد ها ، ربات های پیچیده ، بازوی مکانیکی ربات و سیستم های چند روبات پیشنهاد می کنند. درختان رفتاری اکنون به بلوغی رسیده اند که در کتابهای درسی هوش مصنوعی بازی ویدیویی ، و همچنین در محیط های بازی عمومی مانند Unity ( موتور بازی ) و Unreal Engine ( تیم های غیر واقعی ) به آنها پرداخته شود.
درختان رفتاری به خاطر الگوی توسعه ی خود ، محبوب شدند: این که بتوانند فقط با برنامه ریزی اقدامات NPC و سپس طراحی یک ساختار درختی ( معمولاً از طریق کشیدن و رها کردن ) که گره های برگ آن ها ، اعمال هستند و گره های داخلی ، تصمیم گیری NPC را تعیین می کنند ، رفتاری پیچیده را ایجاد کنند. از نظر بصری درختان رفتاری شهودی اند و به آسانی طراحی ، آزمایش و اشکال زدایی می شوند و نسبت به دیگر شیوه های ایجاد رفتار مدولار بودن، مقیاس پذیری و قابلیت استفاده مجدد بیشتر فراهم می کنند .
در گذر سالها ، پیاده سازی های متنوع درختان رفتاری ، هم از نظر کارایی و بهره وری و هم از نظر توانایی برای تأمین خواسته های صنعت ، بهبود می یافتند ، تا اینکه به درختان رفتار رویداد محور تکامل پیدا کردند . درختان رفتار رویداد محور ، با تغییر اینکه درخت چگونه به صورت درونی به اجرای خود رسیدگی میکند ، و با معرفی نوع جدیدی از گره که می تواند به حوادث واکنش نشان دهد و گره های در حال اجرا را سقط کند وبیندازد ، برخی از مسائل مقیاس پذیری درختان رفتار کلاسیک را حل کردند. امروزه ، مفهوم درخت رفتار رویداد محور یک استاندارد است و در بیشتر پیاده سازی ها استفاده می شود ، حتی اگر برای سادگی هنوز "درختان رفتار" نامیده شوند.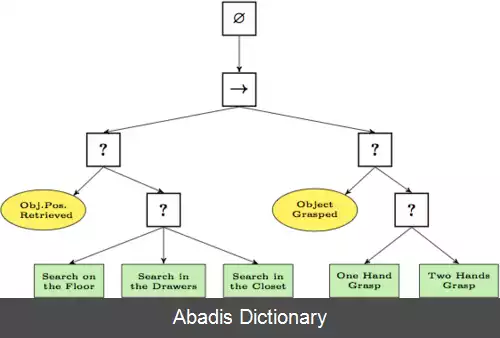
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفدرختان رفتار از صنعت بازی های رایانه ای به عنوان ابزاری قدرتمند برای مدل سازی رفتار شخصیت های غیرقابل بازی ( NPC ) نشات گرفته اند. آنها به طور گسترده ای در بازی های ویدیویی رده بالا مانند Halo ، Bioshock و Spore مورد استفاده قرار گرفته اند . فعالیت ها و پژوهش های اخیر ، درختان رفتار را به عنوان یک چارچوب کنترل چند مأموریتی برای پهپاد ها ، ربات های پیچیده ، بازوی مکانیکی ربات و سیستم های چند روبات پیشنهاد می کنند. درختان رفتاری اکنون به بلوغی رسیده اند که در کتابهای درسی هوش مصنوعی بازی ویدیویی ، و همچنین در محیط های بازی عمومی مانند Unity ( موتور بازی ) و Unreal Engine ( تیم های غیر واقعی ) به آنها پرداخته شود.
درختان رفتاری به خاطر الگوی توسعه ی خود ، محبوب شدند: این که بتوانند فقط با برنامه ریزی اقدامات NPC و سپس طراحی یک ساختار درختی ( معمولاً از طریق کشیدن و رها کردن ) که گره های برگ آن ها ، اعمال هستند و گره های داخلی ، تصمیم گیری NPC را تعیین می کنند ، رفتاری پیچیده را ایجاد کنند. از نظر بصری درختان رفتاری شهودی اند و به آسانی طراحی ، آزمایش و اشکال زدایی می شوند و نسبت به دیگر شیوه های ایجاد رفتار مدولار بودن، مقیاس پذیری و قابلیت استفاده مجدد بیشتر فراهم می کنند .
در گذر سالها ، پیاده سازی های متنوع درختان رفتاری ، هم از نظر کارایی و بهره وری و هم از نظر توانایی برای تأمین خواسته های صنعت ، بهبود می یافتند ، تا اینکه به درختان رفتار رویداد محور تکامل پیدا کردند . درختان رفتار رویداد محور ، با تغییر اینکه درخت چگونه به صورت درونی به اجرای خود رسیدگی میکند ، و با معرفی نوع جدیدی از گره که می تواند به حوادث واکنش نشان دهد و گره های در حال اجرا را سقط کند وبیندازد ، برخی از مسائل مقیاس پذیری درختان رفتار کلاسیک را حل کردند. امروزه ، مفهوم درخت رفتار رویداد محور یک استاندارد است و در بیشتر پیاده سازی ها استفاده می شود ، حتی اگر برای سادگی هنوز "درختان رفتار" نامیده شوند.


