
تشخیص گوشه روشی است که در سیستم های بینایی کامپیوتر برای استخراج انواع خاصی از ویژگی ها و محتویات یک تصویر استفاده می شود. تشخیص گوشه اغلب در تشخیص حرکت، انطباق تصویر، ردیابی ویدئو، موزاییک تصویر قطعه قطعه کردن تصویر، دوخت پانوراما، مدل سازی سه بعدی و تشخیص شی مورد استفاده قرار می گیرد. تشخیص گوشه و موضوع تشخیص نقطه برای رسیدن به هدف مشترک هم پوشانی دارد.
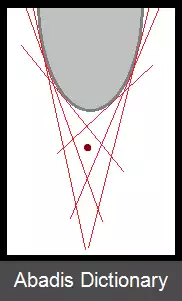
گوشه را می توان به عنوان تقاطع دولبه تعریف کرد، همچنین می توان نقطه ای تعریف کرد که در همسایگی اش دو جهت لبهٔ متفاوت و غالب وجود دارد.
نقطهٔ مطلوب در تشخیص گوشه، نقطه ای است که موقعیتش به خوبی تعریف و شناسایی می شود. این به این معنی است که نقطهٔ مطلوب شناسایی شده می تواند به عنوان گوشه شناسایی شود، اما ممکن است یک نقطهٔ مجزایی باشد که شدت روشنایی اش نسبت به همسایگی اطرافش مقدار ماکزیمم یا مینیمم باشد، پایان یک خط باشد یا اینکه نقطه ای از یک منحنی باشد که در آن نقطه انحنای منحنی بیشترین مقدار می باشد.
در عمل، بیشتر روش های تشخیص گوشه به طور کلی نقاط مطلوب را تشخیص می دهند و در واقع، اصطلاح «گوشه» و «نقطهٔ مطلوب» در ادبیات های مختلف بیشتر یا کمتر تغییر می کند. در نتیجه، اگر فقط بخواهیم گوشه شناسایی شود، برای تشخیص نقاط گوشه های واقعی، لازم است تجزیه و تحلیل های محلی بر روی نقاط مطلوب انجام گیرد. نمونه هایی از تشخیص لبه که در پیش پردازش برای شناسایی گوشه به کار می رود، اپراتور کیرش و مجموعه ماسک فری - چن می باشد. [ ۱]
«گوشه» و «نقطهٔ مطلوب» و «ویژگی» به جای یکدیگر استفاده می شود. به طور خاص چند شناساگر لکه وجود دارد که به «اپراتورهای تشخیص نقطهٔ مطلوب» اشاره می کند اما گاهی اوقات به اشتباه به «آشکارسازهای گوشه» اشاره می کند. علاوه بر این، برای دستیابی به مرز اشیا یک مفهوم شناسایی مرز ( ridge detection ) وجود دارد.
آشکارسازهای گوشه معمولاً به اندازهٔ کافی قوی نیستند و اغلب برای جلوگیری از اثر خطاهای فردی ناشی از تشخیص نیازمند ریداندانت است.
یک راه تشخیص میزان کیفیت یک آشکارساز گوشه توانایی تشخیص گوشه های مشابه در تصاویر مشابه، در شرایط روشنایی مختلف، انتقال، چرخش و سایر تغییرات است.
یک رویکرد ساده برای تشخیص گوشه در تصاویر، از همبستگی استفاده می کند، اما دارای محاسبات زیادی می باشد. یک رویکرد جایگزین که اغلب استفاده می شود براساس یک روش پیشنهادی توسط هریس و استفنز است که به نوبه خود بهبود روش مراوک می باشد.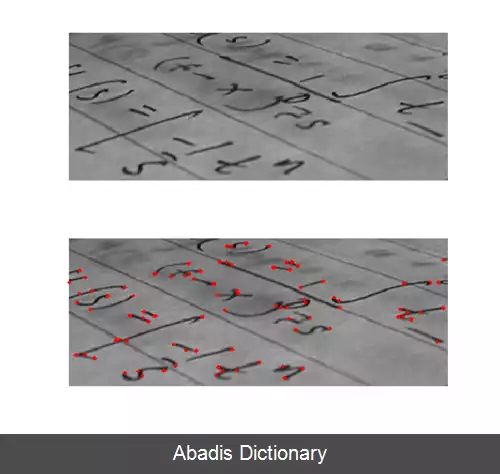
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفگوشه را می توان به عنوان تقاطع دولبه تعریف کرد، همچنین می توان نقطه ای تعریف کرد که در همسایگی اش دو جهت لبهٔ متفاوت و غالب وجود دارد.
نقطهٔ مطلوب در تشخیص گوشه، نقطه ای است که موقعیتش به خوبی تعریف و شناسایی می شود. این به این معنی است که نقطهٔ مطلوب شناسایی شده می تواند به عنوان گوشه شناسایی شود، اما ممکن است یک نقطهٔ مجزایی باشد که شدت روشنایی اش نسبت به همسایگی اطرافش مقدار ماکزیمم یا مینیمم باشد، پایان یک خط باشد یا اینکه نقطه ای از یک منحنی باشد که در آن نقطه انحنای منحنی بیشترین مقدار می باشد.
در عمل، بیشتر روش های تشخیص گوشه به طور کلی نقاط مطلوب را تشخیص می دهند و در واقع، اصطلاح «گوشه» و «نقطهٔ مطلوب» در ادبیات های مختلف بیشتر یا کمتر تغییر می کند. در نتیجه، اگر فقط بخواهیم گوشه شناسایی شود، برای تشخیص نقاط گوشه های واقعی، لازم است تجزیه و تحلیل های محلی بر روی نقاط مطلوب انجام گیرد. نمونه هایی از تشخیص لبه که در پیش پردازش برای شناسایی گوشه به کار می رود، اپراتور کیرش و مجموعه ماسک فری - چن می باشد. [ ۱]
«گوشه» و «نقطهٔ مطلوب» و «ویژگی» به جای یکدیگر استفاده می شود. به طور خاص چند شناساگر لکه وجود دارد که به «اپراتورهای تشخیص نقطهٔ مطلوب» اشاره می کند اما گاهی اوقات به اشتباه به «آشکارسازهای گوشه» اشاره می کند. علاوه بر این، برای دستیابی به مرز اشیا یک مفهوم شناسایی مرز ( ridge detection ) وجود دارد.
آشکارسازهای گوشه معمولاً به اندازهٔ کافی قوی نیستند و اغلب برای جلوگیری از اثر خطاهای فردی ناشی از تشخیص نیازمند ریداندانت است.
یک راه تشخیص میزان کیفیت یک آشکارساز گوشه توانایی تشخیص گوشه های مشابه در تصاویر مشابه، در شرایط روشنایی مختلف، انتقال، چرخش و سایر تغییرات است.
یک رویکرد ساده برای تشخیص گوشه در تصاویر، از همبستگی استفاده می کند، اما دارای محاسبات زیادی می باشد. یک رویکرد جایگزین که اغلب استفاده می شود براساس یک روش پیشنهادی توسط هریس و استفنز است که به نوبه خود بهبود روش مراوک می باشد.


wiki: تشخیص گوشه