
میخواهیم راجب مطلب مهمی با نام تشخیص پیش زمینه صحبت کنیم. اصلا تشخیص پیش زمینه چیست؟ در واقع تشخیص پیش زمینه یکی از وظایف اصلی در زمینه بینایی کامپیوتری و پردازش تصویر است که هدف آن تشخیص تغییرات در توالی تصویر است. تفریق پس زمینه هر تکنیکی است که اجازه می دهد پیش زمینه تصویر برای پردازش بیشتر ( تشخیص شی و غیره ) استخراج شود. بسیاری از برنامه ها نیازی به دانستن همه چیز در مورد تکامل حرکت در یک توالی ویدیو ندارند، بلکه فقط به اطلاعات تغییرات در صحنه نیاز دارند، زیرا مناطق مورد نظر یک تصویر، اشیا ( انسان، اتومبیل، متن و غیره ) در پیش زمینه آن هستند. پس از مرحله پیش پردازش تصویر ( که ممکن است شامل حذف نویز تصویر ، پس پردازش مانند مورفولوژی و غیره باشد ) محلی سازی شی مورد نیاز است که ممکن است از این تکنیک استفاده کند. تشخیص پیش زمینه بر اساس این تغییرات که در پیش زمینه رخ می دهد، پیش زمینه را از پس زمینه جدا می کند. این مجموعه ای از تکنیک ها است که معمولاً توالی های ویدیویی ضبط شده در زمان واقعی با یک دوربین ثابت را تجزیه و تحلیل می کند.
حال میخواهیم به بررسی این بپردازیم که فیلتر میانگین زمانی چیست و چه موقه به ما کمک خواهد کرد. فیلتر میانگین زمانی روشی است که در Velastin پیشنهاد شده است. این سیستم مدل پس زمینه را از میانه تمام پیکسل های تعدادی از تصاویر قبلی تخمین می زند. این سیستم از یک بافر با مقادیر پیکسل آخرین فریم ها برای به روز رسانی میانه هر تصویر استفاده می کند. برای مدل سازی پس زمینه، سیستم تمام تصاویر را در یک دوره زمانی معین به نام زمان آموزش بررسی می کند . در این زمان ما فقط تصاویر را نمایش می دهیم و این بار میانه پیکسل به پیکسل تمام نمودارها را در پس زمینه پیدا می کنیم.
پس از دوره آموزشی برای هر فریم جدید، هر پیکسل با مقدار ورودی وجوه محاسبه شده قبلی مقایسه می شود. اگر پیکسل ورودی در یک آستانه باشد، پیکسل مطابق با مدل پس زمینه در نظر گرفته می شود و مقدار آن در pixbuf گنجانده می شود. در غیر این صورت، اگر مقدار خارج از این آستانه باشد، پیکسل به عنوان پیش زمینه طبقه بندی می شود و در بافر گنجانده نمی شود.
اما این روش را نباید کارآمد در نظر گرفت زیرا آنها مبنای آماری دقیقی ارائه نمی دهند و به بافری نیاز دارند که هزینه محاسباتی بالایی دارد.
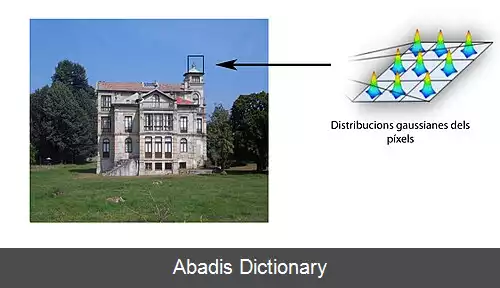
در رویکرد های موسوم یک الگوریتم تفریق پس زمینه قوی باید بتواند تغییرات نور، حرکات تکراری ناشی از بهم ریختگی و تغییرات طولانی مدت صحنه را مدیریت کند. حال شاید از خود بپرسید که چگونه؟ تحلیل های زیر از تابع V ( x ، y ، t ) به عنوان یک دنباله ویدیویی استفاده می کنند که در آن t بعد زمان، x و y متغیرهای مکان پیکسل هستند. به عنوان مثال V ( 1، 2، 3 ) شدت پیکسل در ( 1، 2 ) محل پیکسل تصویر در t = 3 در دنباله ویدیو است.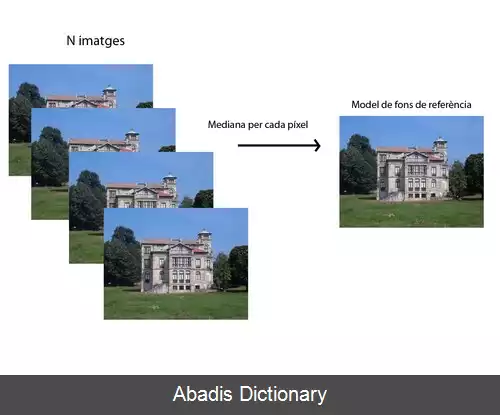
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفحال میخواهیم به بررسی این بپردازیم که فیلتر میانگین زمانی چیست و چه موقه به ما کمک خواهد کرد. فیلتر میانگین زمانی روشی است که در Velastin پیشنهاد شده است. این سیستم مدل پس زمینه را از میانه تمام پیکسل های تعدادی از تصاویر قبلی تخمین می زند. این سیستم از یک بافر با مقادیر پیکسل آخرین فریم ها برای به روز رسانی میانه هر تصویر استفاده می کند. برای مدل سازی پس زمینه، سیستم تمام تصاویر را در یک دوره زمانی معین به نام زمان آموزش بررسی می کند . در این زمان ما فقط تصاویر را نمایش می دهیم و این بار میانه پیکسل به پیکسل تمام نمودارها را در پس زمینه پیدا می کنیم.
پس از دوره آموزشی برای هر فریم جدید، هر پیکسل با مقدار ورودی وجوه محاسبه شده قبلی مقایسه می شود. اگر پیکسل ورودی در یک آستانه باشد، پیکسل مطابق با مدل پس زمینه در نظر گرفته می شود و مقدار آن در pixbuf گنجانده می شود. در غیر این صورت، اگر مقدار خارج از این آستانه باشد، پیکسل به عنوان پیش زمینه طبقه بندی می شود و در بافر گنجانده نمی شود.
اما این روش را نباید کارآمد در نظر گرفت زیرا آنها مبنای آماری دقیقی ارائه نمی دهند و به بافری نیاز دارند که هزینه محاسباتی بالایی دارد.
در رویکرد های موسوم یک الگوریتم تفریق پس زمینه قوی باید بتواند تغییرات نور، حرکات تکراری ناشی از بهم ریختگی و تغییرات طولانی مدت صحنه را مدیریت کند. حال شاید از خود بپرسید که چگونه؟ تحلیل های زیر از تابع V ( x ، y ، t ) به عنوان یک دنباله ویدیویی استفاده می کنند که در آن t بعد زمان، x و y متغیرهای مکان پیکسل هستند. به عنوان مثال V ( 1، 2، 3 ) شدت پیکسل در ( 1، 2 ) محل پیکسل تصویر در t = 3 در دنباله ویدیو است.


wiki: تشخیص پیش زمینه