
تبدیل ویژگی مستقل از مقیاس ( SIFT ) یک الگوریتم در بینایی ماشین است که برای استخراج ویژگی های مشخص از تصاویر، برای استفاده در الگوریتم های کارهایی چون تطبیق نماهای مختلف یک جسم یا صحنه ( برای نمونه در دید دوچشمی ) و شناسایی اجسام به کار می رود. ویژگی های بدست آمده نسبت به مقیاس تصویر و چرخش ناوردا و نسبت به تغییر دیدگاه و تغییرات نورپردازی تا اندازه ای ناوردایند. نام تبدیل مقیاس نابسته ویژگی از آن سو که الگوریتم داده های تصویر را به مختصات مقیاس نابسته ای نسبت به ویژگی های محلی تبدیل می کند بر آن نهاده شد.
الگوریتم توسط دیوید لوو در دانشگاه بریتیش کلمبیا ساخته شد، که امتیاز ثبت اختراع آن در ایالات متحده را نیز دارد.
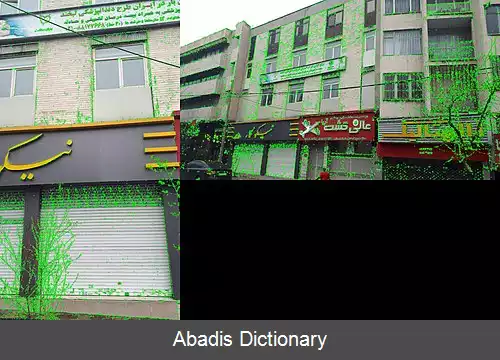
به طور کلی تشخیص در الگوریتم sift از طریق دو بخش انجام می شود که عبارتند از :
• تشخیص نقاط کلیدی تصویر
• محاسبه اطلاعات توصیف کننده نقاط
تشخیص نقاط کلیدی تصویر بدین صورت انجام می شود که نقاط کلیدی به نقاطی از تصویر که در فضای مقیاس تصویر اکسترمم است اتلاق می شود و فضای مقیاس تصویر شامل مجموعه ای از تصاویر است . تصاویر این مجموعه با استفاده از کانولوشن تصویر اصلی با فیلترهای گوسی با مقیاس های مختلف تولید می شوند.
برای ساخت فضای مقیاس می توان با کانوالو کردن تصویر با یک تابع گوسی ، یک نمونه بدست آورد و با تغییر واریانس می توان میزان اسموز شده تری از تصویر را بدست آورد.
فضای مقیاس شامل چند تصویر است که با چند بار اعمال فیلتر گوسی بدست می آید.
در ساخت فضای مقیاس سپس عمل ریسمپلینگ انجام می شود و یک اکتاو جدید ساخته می شود. در هر اکتاو تفاضل گوسی ها ( DoG ) محاسبه می شود.
برای یافتن نقاط کلیدی اکسترمم های تابع d محاسبه می شود. هر نقطه با هشت همسایه و نقاط همسایه در صفحات مجاور در نظر گرفته می شود. سپس نقاط نامناسب حذف می شوند.
ا اینجا به ازای هر نقطه کلیدی، یک مختصات و یک مقیاس داریم یعنی : ( x, y , δ )
بردار گرادیان در هر نقطه تصویر ، جهت و اندازه بیشترین تغییرات را نشان می دهد و عمود بر لبه است.
برای ثابت بودن نسبت به دوران ، یک دستگاه مختصات از روی گرادیان تعریف می شود.
در یک پنجره اطراف هر نقطه کلیدی ، یک هیستوگرام از گرادیان ها ساخته می شود و جهتی که بیشترین فراوانی را دارد به عنوان جهت غالب انتخاب می شود.
به هر نقطه کلیدی یک بردار ویژگی شامل 128 مولفه اختصاص داده می شود. پنجره اطراف نقطه کلیدی به 4*4 زیرپنجره تقسیم می شود و در هر زیرپنجره یک هیستوگرام از گرادیان ها رسم می شود ( هر هیستوگرام شامل 8 مقدار است. )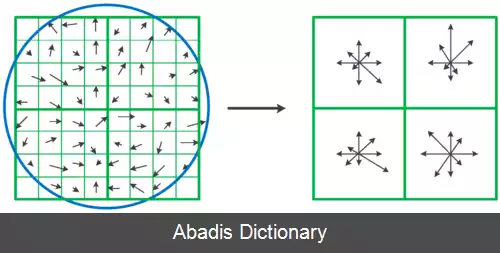
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفالگوریتم توسط دیوید لوو در دانشگاه بریتیش کلمبیا ساخته شد، که امتیاز ثبت اختراع آن در ایالات متحده را نیز دارد.
به طور کلی تشخیص در الگوریتم sift از طریق دو بخش انجام می شود که عبارتند از :
• تشخیص نقاط کلیدی تصویر
• محاسبه اطلاعات توصیف کننده نقاط
تشخیص نقاط کلیدی تصویر بدین صورت انجام می شود که نقاط کلیدی به نقاطی از تصویر که در فضای مقیاس تصویر اکسترمم است اتلاق می شود و فضای مقیاس تصویر شامل مجموعه ای از تصاویر است . تصاویر این مجموعه با استفاده از کانولوشن تصویر اصلی با فیلترهای گوسی با مقیاس های مختلف تولید می شوند.
برای ساخت فضای مقیاس می توان با کانوالو کردن تصویر با یک تابع گوسی ، یک نمونه بدست آورد و با تغییر واریانس می توان میزان اسموز شده تری از تصویر را بدست آورد.
فضای مقیاس شامل چند تصویر است که با چند بار اعمال فیلتر گوسی بدست می آید.
در ساخت فضای مقیاس سپس عمل ریسمپلینگ انجام می شود و یک اکتاو جدید ساخته می شود. در هر اکتاو تفاضل گوسی ها ( DoG ) محاسبه می شود.
برای یافتن نقاط کلیدی اکسترمم های تابع d محاسبه می شود. هر نقطه با هشت همسایه و نقاط همسایه در صفحات مجاور در نظر گرفته می شود. سپس نقاط نامناسب حذف می شوند.
ا اینجا به ازای هر نقطه کلیدی، یک مختصات و یک مقیاس داریم یعنی : ( x, y , δ )
بردار گرادیان در هر نقطه تصویر ، جهت و اندازه بیشترین تغییرات را نشان می دهد و عمود بر لبه است.
برای ثابت بودن نسبت به دوران ، یک دستگاه مختصات از روی گرادیان تعریف می شود.
در یک پنجره اطراف هر نقطه کلیدی ، یک هیستوگرام از گرادیان ها ساخته می شود و جهتی که بیشترین فراوانی را دارد به عنوان جهت غالب انتخاب می شود.
به هر نقطه کلیدی یک بردار ویژگی شامل 128 مولفه اختصاص داده می شود. پنجره اطراف نقطه کلیدی به 4*4 زیرپنجره تقسیم می شود و در هر زیرپنجره یک هیستوگرام از گرادیان ها رسم می شود ( هر هیستوگرام شامل 8 مقدار است. )





wiki: تبدیل ویژگی مقیاس نابسته