
کامپوزیت های پلیمر - فلز یونی ( IPMCs ) کامپوزیت های مصنوعی نانومواد هستند که رفتار ماهیچه های مصنوعی را تحت ولتاژ یا میدان الکتریکی اعمال شده نشان می دهند.
کامپوزیت پلیمر - فلز یونیها از یک پلیمر یونی مانند نفیون یا فلمیون تشکیل شده اند که سطوح آن از نظر شیمیایی آبکاری شده یا از نظر فیزیکی با هادی هایی مثل پلاتین یا طلا پوشیده شده اند. تحت یک ولتاژ اعمال شده ( ۱ تا ۵ ولت برای نمونه های با اندازه معمولی 10mmx40mmx0. 2mm ) ، انتقال و توزیع مجدد یون به دلیل ولتاژ تحمیلی در نوار کامپوزیت پلیمر - فلز یونی منجر به تغییر شکل خمشی می شود. همچنین، کامپوزیت های پلیمر - فلز یونی می توانند هیدروژل یونی باشند که در محلول الکترولیت غوطه ور شده و به طور غیر مستقیم به میدان الکتریکی متصل می شوند. [ ۲]
اگر الکترودهای آبکاری شده به شکلی غیر متقارن چیده شوند، ولتاژ تحمیلی می تواند شکل های مختلفی مانند پیچش، غلتش، پیچش، چرخش، چرخش، چرخش و تغییر شکل خمشی غیر متقارن را ایجاد کند. از طرف دیگر، اگر چنین تغییر شکل هایی به صورت فیزیکی روی نوارهای IPMC اعمال شوند، سیگنال ولتاژ خروجی ( چند میلی ولت برای نمونه های کوچک معمولی ) را به عنوان حسگرها و برداشت کننده های انرژی تولید می کنند. IPMCها نوعی پلیمر الکترواکتیو هستند. آنها در محیط های سیال ( مایع و گاز ) بسیار خوب عمل می کنند. آنها دارای چگالی نیرویی در حدود ۴۰ در یک پیکربندی کنسول هستند، به این معنی که آنها می توانند نیروی نوک تقریباً ۴۰ برابر وزن خود را در حالت کنسول ایجاد کنند. IPMCها در فعال سازی، سنجش و برداشت انرژی دارای پهنای باند بسیار وسیع تا کیلو هرتز و بالاتر هستند.
کامپوزیت های پلیمر - فلز یونی اولین بار در سال ۱۹۹۸ توسط شاهین پور، بارکوهن، ژو، سیمپسون و اسمیت معرفی شدند ( به منابع زیر مراجعه کنید ) اما ایده اصلی محرک ها و حسگرهای پلیمری یونی به سال های ۱۹۹۲–۱۹۹۳ توسط آدولف، شاهین پور، سگالمن، ویتکوفسکی، اوسادا برمی گردد. Okuzaki, Hori, Doi, Matsumoto, Hirose, Oguro, Takenaka, Asaka و Kawami همان طور که در زیر نشان داده شده است:
1 - Segalman DJ, Witkowski WR, Adolf DB, Shahinpoor M. "Theory and Applications of Electrically Controlled Polymeric Gels", Int. مجله مصالح و سازه های هوشمند، ش. ۱، صص ۹۵–۱۰۰، ( ۱۹۹۲ )
۲ - شاهین پور م. «طراحی مفهومی، سینماتیک و دینامیک سازه های رباتیک شنا با استفاده از ماهیچه های ژل پلیمری یونی»، بین المللی. مجله مصالح و سازه های هوشمند، جلد ۱، صص. ۹۱–۹۴، ( ۱۹۹۲ )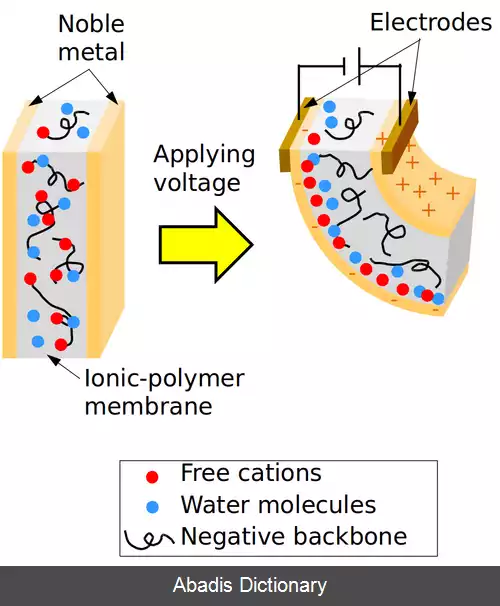
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفکامپوزیت پلیمر - فلز یونیها از یک پلیمر یونی مانند نفیون یا فلمیون تشکیل شده اند که سطوح آن از نظر شیمیایی آبکاری شده یا از نظر فیزیکی با هادی هایی مثل پلاتین یا طلا پوشیده شده اند. تحت یک ولتاژ اعمال شده ( ۱ تا ۵ ولت برای نمونه های با اندازه معمولی 10mmx40mmx0. 2mm ) ، انتقال و توزیع مجدد یون به دلیل ولتاژ تحمیلی در نوار کامپوزیت پلیمر - فلز یونی منجر به تغییر شکل خمشی می شود. همچنین، کامپوزیت های پلیمر - فلز یونی می توانند هیدروژل یونی باشند که در محلول الکترولیت غوطه ور شده و به طور غیر مستقیم به میدان الکتریکی متصل می شوند. [ ۲]
اگر الکترودهای آبکاری شده به شکلی غیر متقارن چیده شوند، ولتاژ تحمیلی می تواند شکل های مختلفی مانند پیچش، غلتش، پیچش، چرخش، چرخش، چرخش و تغییر شکل خمشی غیر متقارن را ایجاد کند. از طرف دیگر، اگر چنین تغییر شکل هایی به صورت فیزیکی روی نوارهای IPMC اعمال شوند، سیگنال ولتاژ خروجی ( چند میلی ولت برای نمونه های کوچک معمولی ) را به عنوان حسگرها و برداشت کننده های انرژی تولید می کنند. IPMCها نوعی پلیمر الکترواکتیو هستند. آنها در محیط های سیال ( مایع و گاز ) بسیار خوب عمل می کنند. آنها دارای چگالی نیرویی در حدود ۴۰ در یک پیکربندی کنسول هستند، به این معنی که آنها می توانند نیروی نوک تقریباً ۴۰ برابر وزن خود را در حالت کنسول ایجاد کنند. IPMCها در فعال سازی، سنجش و برداشت انرژی دارای پهنای باند بسیار وسیع تا کیلو هرتز و بالاتر هستند.
کامپوزیت های پلیمر - فلز یونی اولین بار در سال ۱۹۹۸ توسط شاهین پور، بارکوهن، ژو، سیمپسون و اسمیت معرفی شدند ( به منابع زیر مراجعه کنید ) اما ایده اصلی محرک ها و حسگرهای پلیمری یونی به سال های ۱۹۹۲–۱۹۹۳ توسط آدولف، شاهین پور، سگالمن، ویتکوفسکی، اوسادا برمی گردد. Okuzaki, Hori, Doi, Matsumoto, Hirose, Oguro, Takenaka, Asaka و Kawami همان طور که در زیر نشان داده شده است:
1 - Segalman DJ, Witkowski WR, Adolf DB, Shahinpoor M. "Theory and Applications of Electrically Controlled Polymeric Gels", Int. مجله مصالح و سازه های هوشمند، ش. ۱، صص ۹۵–۱۰۰، ( ۱۹۹۲ )
۲ - شاهین پور م. «طراحی مفهومی، سینماتیک و دینامیک سازه های رباتیک شنا با استفاده از ماهیچه های ژل پلیمری یونی»، بین المللی. مجله مصالح و سازه های هوشمند، جلد ۱، صص. ۹۱–۹۴، ( ۱۹۹۲ )
