
مکانیزم استوارت یک ربات موازی شامل دو جسم صلب است: یک سکوی متحرک و یک بستر پایه که موقعیت و جهت بستر پایه ثابت بوده و موقعیت و جهت سکوی متحرک با تغییر طول بازوها تغییر می نماید. این دو جسم با شش بازو به یکدیگر متصل هستند که این اتصالات می توانند مفصل کروی یا یونیورسال باشند. به صورت کلی برای یک مجموعه طول داده شده برای بازوها، موقعیت و جهت سکوی متحرک قابل تعیین است. در دو دههٔ گذشته مکانیزم استوارت موضوع اصلی بسیاری از متون مربوط به ربات های موازی بوده است و در رشته های مختلف مهندسی کاربرد داشته است. مهم ترین مزیت مکانیزم استوارت در مقایسه با مکانیزم های سریال، سفتی ذاتی و نسبت بالای بار به وزن آن است.
آنچه امروزه به عنوان مکانیزم استوارت تعمیم یافته شناخته می شود، شامل دو جسم صلب است که با شش بازو با مفاصل کروی در دو طرف یا کروی در یک طرف و مفصل دو محوره در طرف دیگر، به یکدیگر متصل هستند. به طور عمومی یک مکانیزم استوارت تعمیم یافته شامل دو جسم صلب است که با شش قید هندسی به یکدیگر متصل شده اند. یکی از این اجسام صلب پایه خوانده می شود و ثابت است و جسم صلب دیگر سکوی متحرک خوانده شده و از روی مقادیر شش قید قابل جانمایی است. لذا مکانیزم استوارت تعمیم یافته را می توان در چهار کلاس زیر دسته بندی کرد:
۳D3A: سه قید طولی و سه قید زاویه ای
۴D2A: چهار قید طولی و دو قید زاویه ای
۵D1A: پنج قید طولی و یک قید زاویه ای
۶D: شش قید طولی
قابل ذکر است که نمی توان بیش از سه قید زاویه ای در نظر گرفت زیرا هر جسم صلب حداکثر می تواند سه قید زاویه ای داشته باشد تا جهتش تعیین گردد. تعداد ۱۱۲۰ نوع مکانیزم گو - استوارت از کلاس ۳D3A، ۱۲۶۰ نوع از کلاس ۴D2A، ۱۰۰۸ نوع از کلاس ۵D1A و ۴۶۲ نوع از کلاس ۶D می توان طراحی نمود. در کل ۳۸۵۰ نوع مختلف مکانیزم استوارت وجود دارد. [ ۱]
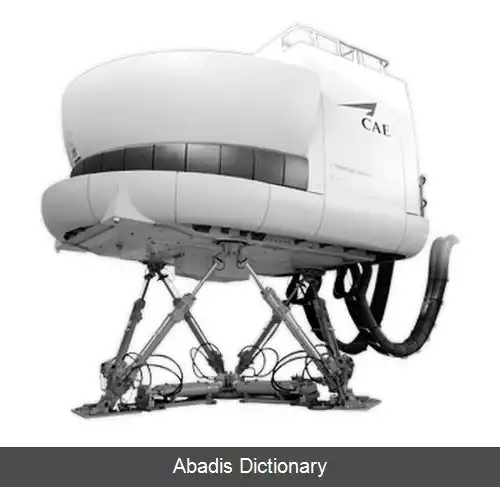
سکوی اولیهٔ طراحی شده توسط آقای استوارت شامل یک سکوی مثلثی شکل بوده است که به وسیلهٔ مفاصل کروی روی سه بازو نگه داری می شد. این سه بازو دارای قابلیت تنظیم طول و ارتفاع زاویه ای بوده که به وسیلهٔ مفصل های دو محوره ( مفصل یونیورسال ) به زمین متصل می شدند. پس از آن، گو پیشنهاد نمود از شش عملگر خطی به صورت موازی استفاده شود و سکو را به یک مکانیزم کاملاً موازی تبدیل نمود. بعدها Hunt پیشنهاد استفاده از مکانیزم های موازی تحریک شده مثل شبیه ساز پرواز استوارت را به عنوان ربات های کنترل شونده داد. [ ۲] اگرچه گو ( Gough ) اولین کسی بود که یک نمونهٔ کارآمد ربات موازی را طراحی کرد، اما هگزاپدها پیش از آن نیز مشهور بودند. سیستم هایی از این نوع تحت نام ( MAST:Multi Simulation Shake Table ) با پایه های عمود، در کاربردهای تست ارتعاشات و زلزله به کار گرفته می شدند.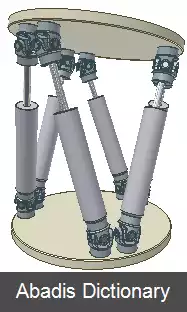

این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفآنچه امروزه به عنوان مکانیزم استوارت تعمیم یافته شناخته می شود، شامل دو جسم صلب است که با شش بازو با مفاصل کروی در دو طرف یا کروی در یک طرف و مفصل دو محوره در طرف دیگر، به یکدیگر متصل هستند. به طور عمومی یک مکانیزم استوارت تعمیم یافته شامل دو جسم صلب است که با شش قید هندسی به یکدیگر متصل شده اند. یکی از این اجسام صلب پایه خوانده می شود و ثابت است و جسم صلب دیگر سکوی متحرک خوانده شده و از روی مقادیر شش قید قابل جانمایی است. لذا مکانیزم استوارت تعمیم یافته را می توان در چهار کلاس زیر دسته بندی کرد:
۳D3A: سه قید طولی و سه قید زاویه ای
۴D2A: چهار قید طولی و دو قید زاویه ای
۵D1A: پنج قید طولی و یک قید زاویه ای
۶D: شش قید طولی
قابل ذکر است که نمی توان بیش از سه قید زاویه ای در نظر گرفت زیرا هر جسم صلب حداکثر می تواند سه قید زاویه ای داشته باشد تا جهتش تعیین گردد. تعداد ۱۱۲۰ نوع مکانیزم گو - استوارت از کلاس ۳D3A، ۱۲۶۰ نوع از کلاس ۴D2A، ۱۰۰۸ نوع از کلاس ۵D1A و ۴۶۲ نوع از کلاس ۶D می توان طراحی نمود. در کل ۳۸۵۰ نوع مختلف مکانیزم استوارت وجود دارد. [ ۱]
سکوی اولیهٔ طراحی شده توسط آقای استوارت شامل یک سکوی مثلثی شکل بوده است که به وسیلهٔ مفاصل کروی روی سه بازو نگه داری می شد. این سه بازو دارای قابلیت تنظیم طول و ارتفاع زاویه ای بوده که به وسیلهٔ مفصل های دو محوره ( مفصل یونیورسال ) به زمین متصل می شدند. پس از آن، گو پیشنهاد نمود از شش عملگر خطی به صورت موازی استفاده شود و سکو را به یک مکانیزم کاملاً موازی تبدیل نمود. بعدها Hunt پیشنهاد استفاده از مکانیزم های موازی تحریک شده مثل شبیه ساز پرواز استوارت را به عنوان ربات های کنترل شونده داد. [ ۲] اگرچه گو ( Gough ) اولین کسی بود که یک نمونهٔ کارآمد ربات موازی را طراحی کرد، اما هگزاپدها پیش از آن نیز مشهور بودند. سیستم هایی از این نوع تحت نام ( MAST:Multi Simulation Shake Table ) با پایه های عمود، در کاربردهای تست ارتعاشات و زلزله به کار گرفته می شدند.



wiki: پلتفرم استوارت