
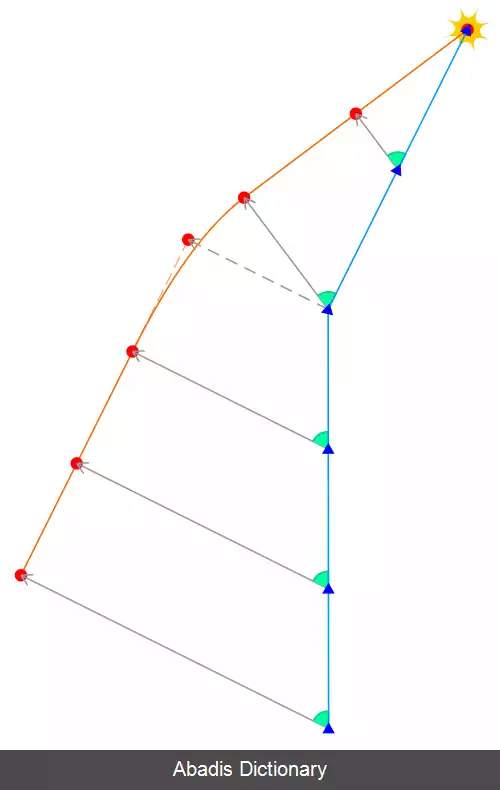
ناوبری همگرایانه یا ناوبری متناسب ( به انگلیسی: Proportional navigation ) شیوهٔ هدایت، ناوبری و کنترل است که به شکلی توسط بیشتر سامانه های هدف گیری موشک ها صورت می گیرد. [ ۱] ناوبری همگرایانه بر این واقعیت بنا شده است که همان طور که دو خودرو به هم نزدیک می شوند اگر خط دید آنها تغییر نکند در مسیر برخورد با هم هستند.
که در آن a n شتاب عمود بر بردار سرعت آنی موشک است، N ثابت تناسب است که معمولاً دارای یک مقدار صحیح 3 - 5 ( بدون بعد ) است. λ ˙ سرعت خط دید است و V شتاب بسته شدن است.
از آنجایی که خط دید به طور کلی با بردار سرعت موشک هم خط نیست، شتاب اعمال شده لزوماً انرژی جنبشی موشک را حفظ نمی کند. در عمل، در صورت عدم وجود قابلیت دریچه گاز موتور، این نوع کنترل ممکن است امکان پذیر نباشد.
ناوبری همگرایانه را می توان با استفاده از شتاب نرمال به اختلاف سرعت لحظه ای نیز به دست آورد:
جایی که Ω سرعت زاویه ای خط دید است:
و V → r = V → t − V → m سرعت هدف نسبت به موشک است و R → = R → t − R → m برد از موشک تا هدف است. این شتاب به طور واضح به بردار اختلاف سرعت بستگی دارد، که ممکن است در عمل به دست آوردن آن دشوار باشد. در مقابل، در فرمول بعدی، وابستگی فقط به تغییر خط دید و بزرگی سرعت بسته شدن است. اگر شتاب نرمال به خط دید آنی مورد نظر باشد ( مانند توضیحات اولیه ) ، عبارت زیر معتبر است:
در صورت نیاز به کنترل صرفه جویی در انرژی ( همانطور که فقط از سطوح کنترلی استفاده می شود ) ، می توان از شتاب زیر که متعامد به سرعت موشک است استفاده کرد:
یک اجرای سخت افزاری نسبتاً ابتدایی از این قانون هدایت را می توان در موشک های اولیه ایم - ۹ سایدوایندر یافت. این موشک ها از یک آینه سهموی با چرخش سریع به عنوان جستجوگر استفاده می کنند. الکترونیک ساده خطای جهتی را که جستجوگر با هدف خود دارد ( منبع فروسرخ ) تشخیص می دهد و یک لحظه روی این آینه گیره دار اعمال می کند تا آن را به سمت هدف نگه دارد. از آنجایی که آینه در واقع یک ژیروسکوپ است، بدون توجه به حرکات موشک، در صورت اعمال هیچ نیروی خارجی یا لحظه ای، به همان جهت اشاره می کند. ولتاژ اعمال شده به آینه در حالی که روی هدف قفل شده است، سپس برای منحرف کردن سطوح کنترلی که موشک را هدایت می کنند، استفاده می شود ( اگرچه تقویت می شود ) ، در نتیجه چرخش بردار سرعت موشک با چرخش خط دید متناسب می شود. اگرچه این منجر به نرخ چرخشی نمی شود که همیشه دقیقاً متناسب با نرخ LOS باشد ( که به سرعت هوایی ثابت نیاز دارد ) ، این پیاده سازی به همان اندازه مؤثر است.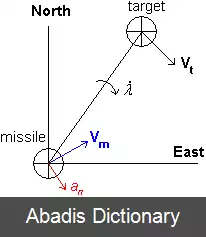
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفکه در آن a n شتاب عمود بر بردار سرعت آنی موشک است، N ثابت تناسب است که معمولاً دارای یک مقدار صحیح 3 - 5 ( بدون بعد ) است. λ ˙ سرعت خط دید است و V شتاب بسته شدن است.
از آنجایی که خط دید به طور کلی با بردار سرعت موشک هم خط نیست، شتاب اعمال شده لزوماً انرژی جنبشی موشک را حفظ نمی کند. در عمل، در صورت عدم وجود قابلیت دریچه گاز موتور، این نوع کنترل ممکن است امکان پذیر نباشد.
ناوبری همگرایانه را می توان با استفاده از شتاب نرمال به اختلاف سرعت لحظه ای نیز به دست آورد:
جایی که Ω سرعت زاویه ای خط دید است:
و V → r = V → t − V → m سرعت هدف نسبت به موشک است و R → = R → t − R → m برد از موشک تا هدف است. این شتاب به طور واضح به بردار اختلاف سرعت بستگی دارد، که ممکن است در عمل به دست آوردن آن دشوار باشد. در مقابل، در فرمول بعدی، وابستگی فقط به تغییر خط دید و بزرگی سرعت بسته شدن است. اگر شتاب نرمال به خط دید آنی مورد نظر باشد ( مانند توضیحات اولیه ) ، عبارت زیر معتبر است:
در صورت نیاز به کنترل صرفه جویی در انرژی ( همانطور که فقط از سطوح کنترلی استفاده می شود ) ، می توان از شتاب زیر که متعامد به سرعت موشک است استفاده کرد:
یک اجرای سخت افزاری نسبتاً ابتدایی از این قانون هدایت را می توان در موشک های اولیه ایم - ۹ سایدوایندر یافت. این موشک ها از یک آینه سهموی با چرخش سریع به عنوان جستجوگر استفاده می کنند. الکترونیک ساده خطای جهتی را که جستجوگر با هدف خود دارد ( منبع فروسرخ ) تشخیص می دهد و یک لحظه روی این آینه گیره دار اعمال می کند تا آن را به سمت هدف نگه دارد. از آنجایی که آینه در واقع یک ژیروسکوپ است، بدون توجه به حرکات موشک، در صورت اعمال هیچ نیروی خارجی یا لحظه ای، به همان جهت اشاره می کند. ولتاژ اعمال شده به آینه در حالی که روی هدف قفل شده است، سپس برای منحرف کردن سطوح کنترلی که موشک را هدایت می کنند، استفاده می شود ( اگرچه تقویت می شود ) ، در نتیجه چرخش بردار سرعت موشک با چرخش خط دید متناسب می شود. اگرچه این منجر به نرخ چرخشی نمی شود که همیشه دقیقاً متناسب با نرخ LOS باشد ( که به سرعت هوایی ثابت نیاز دارد ) ، این پیاده سازی به همان اندازه مؤثر است.


wiki: ناوبری همگرایانه