
ناوبری هذلولوی اشاره به یک گروه از سیستم های ناوبری رادیویی دارد که بر اساس تفاوت زمانی ( فاز ) بین امواج رادیویی در یافتی از فانوس ناوبری عمل می کند. شایان ذکر است که این سیستم بدون استفاده از یک ساعت/زمان مرجع این کار را به انجام می رساند. این زمان ( تفاوت زمانی ) نشانه ای از تفاوت فاصله گیرنده از ایستگاه های فرستنده است. رسم تمام مکان های بالقوه ( مکان هندسی ) از گیرنده برای این تأخیر اندازه گیری شده نمودارهایی از یک سری خطوط هذلولی تولید می کند. با در اختیار داشتن اندازه گیری های بدست آمده از سیگنال دریافتی و انطباق آن با یکی از خطوط هذلولی مکان گیرنده را در دو محل متفاوت مشخص می کند. برای رفع این ابهام می توان از هر نوع اطلاعات ناوبری دیگر استفاده نمود تا به یک نقطه مکان قطعی ( دقیق ) برسیم.
اینگونه سیستم ها نیاز به ایستگاه های کاملاً مجزا دارند که توانایی ارسال سیگنال های با همبستگی زمانی بالا را داشته باشند. این کار به دو روش انجام می شود
• ارسال پالس های کوتاه به طور همزمان پخش می کنند
• ارسال سیگنال های پیوسته ای که فاز آنها یکسان است.
گیرنده ای که در نقطه میانی بین دو ایستگاه قرار دارد سیگنال ها را در یک زمان دریافت می کند یا به بیان دیگر سیگنال های دریافتی فاز یکسانی دارند. اما سیگنال ایستگاه نزدیکتر در هر مکان دیگر زودتر دریافت می شود در نتیجه سیگنال های ردیافتی فاز متفاوتی خواهند داشت.
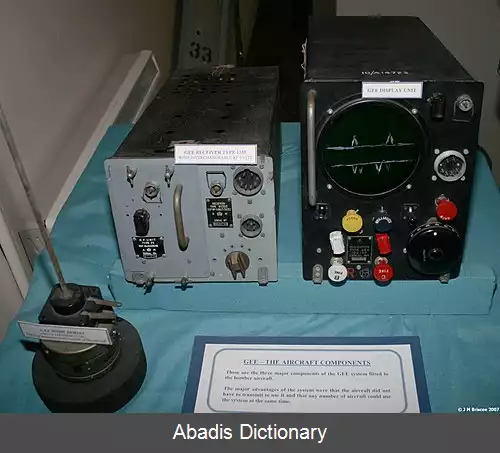
سیستم های مکان یابی هذلولوی برای اولین بار در طول جنگ جهانی اول در سیستم های مکان یابی صوتی برای مکان یابی توپخانه دشمن استفاده شد. صدای شلیک گلوله توسط چندین میکروفون ضبط و زمان دریافت آن به مرکز محاسباتی ارسال شد تا موقعیت توپخانه را ترسیم کنند. سپس این سیستم ها در جنگ جهانی دوم مورد استفاده قرار گرفتند. اولین سیستم ناوبری رادیویی هذلولی، سیستم ناوبری جیی در دوران جنگ جهانی دوم بود که توسط نیروی هوایی سلطنتی برای استفاده توسط فرماندهی بمب افکن RAF معرفی شد. نیروی دریایی سلطنتی در سال ۱۹۴۴ سیستم ناوبری دکا را در کنار متناظر آمریکایی آن در نیروی دریایی ایالات متحده با نام لوران ( برای ناوبری دوربرد در دریا ) به پیش می برد. نمونه های پس از جنگ چنین سیستم هایی، شامل سیستم معروف گارد ساحلی آمریکا لورن - سی، سیستم بین المللی امگا ، و آلفا و چایکا ( مرغ دریایی ) شوروی است. همه این سیستم ها تا دهه 1990 و زمانی که به طور عمده با سیستم های ناوبری ماهواره ای مانند سیستم موقعیت یاب جهانی ( GPS ) جایگزین شدند، مورد استفاده قرار گرفتند.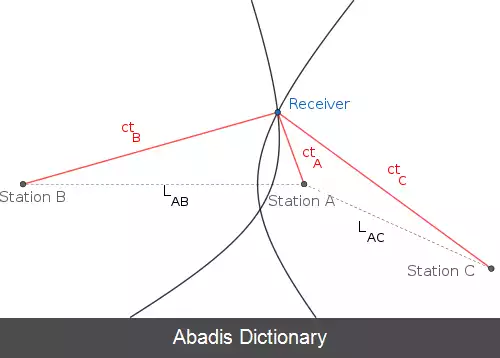
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفاینگونه سیستم ها نیاز به ایستگاه های کاملاً مجزا دارند که توانایی ارسال سیگنال های با همبستگی زمانی بالا را داشته باشند. این کار به دو روش انجام می شود
• ارسال پالس های کوتاه به طور همزمان پخش می کنند
• ارسال سیگنال های پیوسته ای که فاز آنها یکسان است.
گیرنده ای که در نقطه میانی بین دو ایستگاه قرار دارد سیگنال ها را در یک زمان دریافت می کند یا به بیان دیگر سیگنال های دریافتی فاز یکسانی دارند. اما سیگنال ایستگاه نزدیکتر در هر مکان دیگر زودتر دریافت می شود در نتیجه سیگنال های ردیافتی فاز متفاوتی خواهند داشت.
سیستم های مکان یابی هذلولوی برای اولین بار در طول جنگ جهانی اول در سیستم های مکان یابی صوتی برای مکان یابی توپخانه دشمن استفاده شد. صدای شلیک گلوله توسط چندین میکروفون ضبط و زمان دریافت آن به مرکز محاسباتی ارسال شد تا موقعیت توپخانه را ترسیم کنند. سپس این سیستم ها در جنگ جهانی دوم مورد استفاده قرار گرفتند. اولین سیستم ناوبری رادیویی هذلولی، سیستم ناوبری جیی در دوران جنگ جهانی دوم بود که توسط نیروی هوایی سلطنتی برای استفاده توسط فرماندهی بمب افکن RAF معرفی شد. نیروی دریایی سلطنتی در سال ۱۹۴۴ سیستم ناوبری دکا را در کنار متناظر آمریکایی آن در نیروی دریایی ایالات متحده با نام لوران ( برای ناوبری دوربرد در دریا ) به پیش می برد. نمونه های پس از جنگ چنین سیستم هایی، شامل سیستم معروف گارد ساحلی آمریکا لورن - سی، سیستم بین المللی امگا ، و آلفا و چایکا ( مرغ دریایی ) شوروی است. همه این سیستم ها تا دهه 1990 و زمانی که به طور عمده با سیستم های ناوبری ماهواره ای مانند سیستم موقعیت یاب جهانی ( GPS ) جایگزین شدند، مورد استفاده قرار گرفتند.


wiki: ناوبری هذلولوی