
موتورهای دی سی براش لس ( BLDC ) ، موتورهای سنکرونی هستند[ ۱] که با منبع دی سی تغذیه می شوند که توسط اینورتر مجتمع برای به حرکت درآوردن موتور به سیگنال الکتریکی AC موج مربعی تبدیل می شود؛ سنسورها و قطعات الکترونیکی دیگری نیز خروجی اینورتر را کنترل می نمایند. [ ۲] موتورهای براش لس دی سی همچنین به صورت موتورهای پله ای وصف می شوند، هرچند عنوان موتور پله ای برای آن دسته از موتورها به کار می رود که طراحی آن ها به گونه ای است که به حالت هایی عمل نمایند که روتور آن به سرعت در نقطه زاویه ای تعریف شده بایستد. این صفحه اصول کلی تری را
موتورهای دی سی براش به طور تجاری از سال ۱۸۸۶ مورد استفاده قرار گرفت[ نیازمند منبع] . موتورهای براشلس تا ۱۹۶۲ مورد استفاده تجاری قرار نگرفتند. موتورهای براش گشتاور بیشینه را در لحظه سکون فراهم می آورند؛ این گشتاور به صورت خطی با افزایش سرعت کاهش می یابد. برخی محدودیت های موتورهای براش می توانند در موتورهای براشلس جبران شوند. آن ها کارایی بالاتری را به همراه داشته و همچنین حساسیت کمتری نسبت به سایش مکانیکی کموتاتور دارند. این فواید در برابر کاهش نیرو، پیچیدگی بیشتر، و کنترل الکترونیکی گرانتر بدست آمده است. موتور براشلس آهنرباهای دائمی دارد و می گردند و آرمیچر در آن ثابت است؛ به همین دلیل مشکلات به وجود آمده به خاطر ارتباط مستقیم جریان با آرمیچر چرخان از میان برداشته شده اند[ نیازمند منبع] . در این موتورها یک کنترل کننده الکترونیکی، جایگزین براش و کموتاتور شده است؛ که جریان سیم پیچ ها را دائماً عوض می کند تا موتور را به گردش درآورد. کنترل گر توزیع قدرت «همزمان» ( به انگلیسی: Synchronous ) مشابهی را با یک مدار ( حالت جامد؟ ) به جای سیستم براش و کموتاتور فراهم کرد. ارتباط موتور براشلس می تواند در سخت افزار صورت پذیرد یا به جای آن توسط اف پی جی ای ( به انگلیسی: FPGA ) اجرا شود[ نیازمند منبع] . استفاده از اف پی جی ای انعطاف پذیری و توانایی هایی را فراهم کرده است که در موتورهای دی سی براش در دسترس نیست[ نیازمند منبع] . همچون محدود کردن سرعت، عملکرد ( Micro stepped ) برای کنترل حرکت آرام یا مورد نظر و نگه داشتن گشتاور هنگام سکون.
توان بیشینه ای که می تواند به موتور براشلس اعمال شود تقریباً با حرارت محدود می شود؛ چراکه آهنرباها را تضعیف می کند و می تواند به عایق سیم پیچ ها نیز آسیب بزند[ نیازمند منبع] . اشکال اساسی یک موتور براشلس نسبت به موتور براش قیمت بالاتر آن است که از دو مسئله برخاسته است. اول، موتورهای براشلس به مدار کنترل کننده سرعت الکترونیکی پیچیده برای حرکت نیاز دارند. موتورهای براش دی سی می توانند توسط کنترل گرهایی در مقایسه ساده تر تنظیم شوند؛ همچون رئوستا ( مقاومت متغیر ) . هرچند، این روش کارایی را کاهش می دهد؛ چراکه توان در رئوستا تلف می شود. دوم، برخی کاربردهای عملی به خوبی در بخش تجاری فراهم نیامده است. برای نمونه، در یک کنترل کننده رادیویی سرگرم کننده، موتورهای براش لس معمولاً دست پیچ شده اند در حالی که موتورهای براش دار معمولاً ماشین پیچ شده اند. ( با این وجود، دستگاه های زیر را ببینید )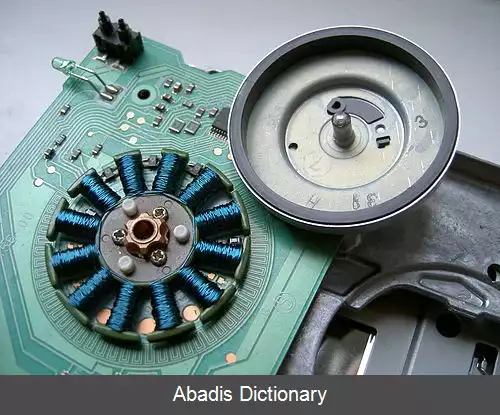
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفموتورهای دی سی براش به طور تجاری از سال ۱۸۸۶ مورد استفاده قرار گرفت[ نیازمند منبع] . موتورهای براشلس تا ۱۹۶۲ مورد استفاده تجاری قرار نگرفتند. موتورهای براش گشتاور بیشینه را در لحظه سکون فراهم می آورند؛ این گشتاور به صورت خطی با افزایش سرعت کاهش می یابد. برخی محدودیت های موتورهای براش می توانند در موتورهای براشلس جبران شوند. آن ها کارایی بالاتری را به همراه داشته و همچنین حساسیت کمتری نسبت به سایش مکانیکی کموتاتور دارند. این فواید در برابر کاهش نیرو، پیچیدگی بیشتر، و کنترل الکترونیکی گرانتر بدست آمده است. موتور براشلس آهنرباهای دائمی دارد و می گردند و آرمیچر در آن ثابت است؛ به همین دلیل مشکلات به وجود آمده به خاطر ارتباط مستقیم جریان با آرمیچر چرخان از میان برداشته شده اند[ نیازمند منبع] . در این موتورها یک کنترل کننده الکترونیکی، جایگزین براش و کموتاتور شده است؛ که جریان سیم پیچ ها را دائماً عوض می کند تا موتور را به گردش درآورد. کنترل گر توزیع قدرت «همزمان» ( به انگلیسی: Synchronous ) مشابهی را با یک مدار ( حالت جامد؟ ) به جای سیستم براش و کموتاتور فراهم کرد. ارتباط موتور براشلس می تواند در سخت افزار صورت پذیرد یا به جای آن توسط اف پی جی ای ( به انگلیسی: FPGA ) اجرا شود[ نیازمند منبع] . استفاده از اف پی جی ای انعطاف پذیری و توانایی هایی را فراهم کرده است که در موتورهای دی سی براش در دسترس نیست[ نیازمند منبع] . همچون محدود کردن سرعت، عملکرد ( Micro stepped ) برای کنترل حرکت آرام یا مورد نظر و نگه داشتن گشتاور هنگام سکون.
توان بیشینه ای که می تواند به موتور براشلس اعمال شود تقریباً با حرارت محدود می شود؛ چراکه آهنرباها را تضعیف می کند و می تواند به عایق سیم پیچ ها نیز آسیب بزند[ نیازمند منبع] . اشکال اساسی یک موتور براشلس نسبت به موتور براش قیمت بالاتر آن است که از دو مسئله برخاسته است. اول، موتورهای براشلس به مدار کنترل کننده سرعت الکترونیکی پیچیده برای حرکت نیاز دارند. موتورهای براش دی سی می توانند توسط کنترل گرهایی در مقایسه ساده تر تنظیم شوند؛ همچون رئوستا ( مقاومت متغیر ) . هرچند، این روش کارایی را کاهش می دهد؛ چراکه توان در رئوستا تلف می شود. دوم، برخی کاربردهای عملی به خوبی در بخش تجاری فراهم نیامده است. برای نمونه، در یک کنترل کننده رادیویی سرگرم کننده، موتورهای براش لس معمولاً دست پیچ شده اند در حالی که موتورهای براش دار معمولاً ماشین پیچ شده اند. ( با این وجود، دستگاه های زیر را ببینید )

wiki: موتور بدون جاروبک دی سی