
مدل داخلی (کنترل موتور). کنترل مدل داخلی در حقیقت یکی از انواع معماری های بکار گرفته شده توسط شبکه عصبی می باشد که در آن از شبکه عصبی به عنوان تخمین زن سیستم برای کنترل حرکت یا سیستم های مشابه دیگر استفاده می گردد. سپس مقدار مورد پیش بینی با خروجی مدل مقایسه می شود تا خطای موجود را شناسایی کند و نهایتاً این اختلاف از طریق بازخوردی که کنترل گر منتهی می شود به اصلاح فرایند کنترل منجر می شود.
همانطور که در شکل مشاهده می کنید موقعیت مطلوب ورودی تحت عنوان ورودی مرجع به کنترل کننده اعمال شده و سپس فرمان کنترلی صادر شده توسط کنترل کننده به صورت دو نسخه همسان به سیستم و مدل پیشرونده اعمال می گردد و اختلاف بین خروجی آن ها که می تواند عواملی چون نویز محیطی را تشخیص دهد به کنترل کننده بازخورد می کند. لازم بذکر است که مدل پیشرونده در شکل فوق نوعی تخمین زن با استفاده از شبکه عصبی می باشد تا بتواند شرایطی همانند پلنت مورد نظر ایجاد بکند تا از سیگنال های ورودی - که مطابق با سیگنال خروجی کنترل کننده می باشد – بتواند خروجی مطلوب را جهت مقایسه با خروجی واقعی تولید کند. [ ۱] [ ۲]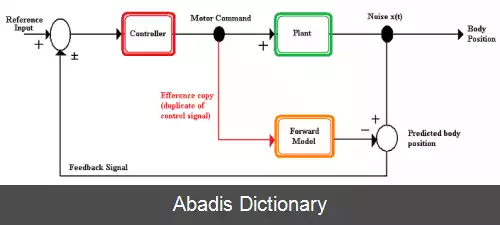
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفهمانطور که در شکل مشاهده می کنید موقعیت مطلوب ورودی تحت عنوان ورودی مرجع به کنترل کننده اعمال شده و سپس فرمان کنترلی صادر شده توسط کنترل کننده به صورت دو نسخه همسان به سیستم و مدل پیشرونده اعمال می گردد و اختلاف بین خروجی آن ها که می تواند عواملی چون نویز محیطی را تشخیص دهد به کنترل کننده بازخورد می کند. لازم بذکر است که مدل پیشرونده در شکل فوق نوعی تخمین زن با استفاده از شبکه عصبی می باشد تا بتواند شرایطی همانند پلنت مورد نظر ایجاد بکند تا از سیگنال های ورودی - که مطابق با سیگنال خروجی کنترل کننده می باشد – بتواند خروجی مطلوب را جهت مقایسه با خروجی واقعی تولید کند. [ ۱] [ ۲]

wiki: مدل داخلی (کنترل موتور)