
فیلتر کالمَن ( به انگلیسی: Kalman filter ) که به عنوان تخمین خطی مرتبه دوم نیز از آن یاد می شود، الگوریتمی است که حالت یک سیستم پویا را با استفاده از مجموعه ای از اندازه گیری های شامل خطا در طول زمان برآورد می کند. این فیلتر معمولاً تخمین دقیق تری را نسبت به تخمین بر مبنای یک اندازه گیری واحد را بر مبنای استنباط بیزی و تخمین توزیع احتمال مشترکی از یک متغیر تصادفی در یک مقطع زمانی ارائه می کند. این فیلتر از نام رودولف ئی کالمن، یکی از پایه گذاران این تئوری گرفته شده است.
فیلتر کالمن کاربردهای بسیاری در علم و فناوری مانند مسیریابی و پایش وسایل نقلیه، به خصوص هواپیما و فضاپیماها، دارد. فیلتر کالمن مفاهیم گسترده ای را در زمینه سری های زمانی، پردازش سیگنال و اقتصادسنجی مطرح می کند. این فیلتر از مفاهیم پایه در زمینه برنامه ریزی و پایش ربات ها و همچنین مدلسازی سیستم عصبی محسوب می شود. بر اساس تأخیر زمانی میان ارسال فرامین و دریافت پاسخ آن ها، استفاده از فیلتر کالمن در تخمین حالات مختلف سیستم را ممکن می سازد. [ ۱]
این الگوریتم در دو گام اجرا می شود. در گام پیش بینی، فیلتر کالمن تخمینی از وضعیت فعلی متغیرها را در شرایط عدم قطعیت ارائه می کند. زمانی که نتیجه اندازه گیری بعدی بدست آید، تخمین قبلی با میانگین وزن دار آپدیت می شود. به این ترتیب که وزن اطلاعاتی که دارای قطعیت بیشتری هستند، بیشتر خواهد بود. الگوریتم بازگشتی می باشد و با استفاده از ورودی های جدید و حالات محاسبه شدهٔ قبلی به صورت بی درنگ اجرا می شود.
درمورد ورودی های فیلتر کالمن نمی توان بیان کرد که تمام خطاها گوسی هستند. اما در عمل فیلتر برآوردهای احتمالاتی را با فرض توزیع طبیعی داشتن انجام می دهد. [ ۲]
تهیه اطلاعات پیوسته و گسسته به روز و دقیق در مورد مکان و سرعت یک شی معین فقط به کمک توالی مشاهدات در مورد موقعیت آن شی، که هر کدام شامل مقداری خطاست امکان پذیر است. این فیلتر در طیف گسترده ای از کاربری های مهندسی از رادار گرفته تا بینایی رایانه ای کاربرد دارد. روش فیلتر کالمن یکی از عناوین مهم در تئوری کنترل و مهندسی سیستم های کنترلی می باشد.
به عنوان مثال، برای کاربری آن در رادار، آنجا که علاقه مند به ردیابی هدف هستید، اطلاعات در مورد موقعیت، سرعت و شتاب هدف با حجم عظیمی از انحراف به لطف پارازیت در هر لحظه اندازه گیری می شود. فیلتر کالمن از پویایی هدف بهره می گیرد به این صورت که سیر تکاملی آن را کنترل می کند، تا تأثیرات پارازیت را از بین ببرد و یک برآورد خوب از موقعیت هدف در زمان حال ( تصفیه کردن ) و در آینده ( پیش بینی ) یا در گذشته ( الحاق یا هموار سازی ) ارائه می دهد. یک نسخه ساده شده فیلتر کالمن، فیلتر آلفا بتا ( به انگلیسی: alpha beta filter ) ، که همچنان عموماً استفاده می شود از ثابت های static weighting به جای ماتریس های کواریانس استفاده می کند.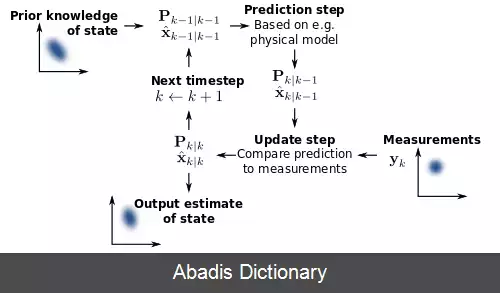
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلففیلتر کالمن کاربردهای بسیاری در علم و فناوری مانند مسیریابی و پایش وسایل نقلیه، به خصوص هواپیما و فضاپیماها، دارد. فیلتر کالمن مفاهیم گسترده ای را در زمینه سری های زمانی، پردازش سیگنال و اقتصادسنجی مطرح می کند. این فیلتر از مفاهیم پایه در زمینه برنامه ریزی و پایش ربات ها و همچنین مدلسازی سیستم عصبی محسوب می شود. بر اساس تأخیر زمانی میان ارسال فرامین و دریافت پاسخ آن ها، استفاده از فیلتر کالمن در تخمین حالات مختلف سیستم را ممکن می سازد. [ ۱]
این الگوریتم در دو گام اجرا می شود. در گام پیش بینی، فیلتر کالمن تخمینی از وضعیت فعلی متغیرها را در شرایط عدم قطعیت ارائه می کند. زمانی که نتیجه اندازه گیری بعدی بدست آید، تخمین قبلی با میانگین وزن دار آپدیت می شود. به این ترتیب که وزن اطلاعاتی که دارای قطعیت بیشتری هستند، بیشتر خواهد بود. الگوریتم بازگشتی می باشد و با استفاده از ورودی های جدید و حالات محاسبه شدهٔ قبلی به صورت بی درنگ اجرا می شود.
درمورد ورودی های فیلتر کالمن نمی توان بیان کرد که تمام خطاها گوسی هستند. اما در عمل فیلتر برآوردهای احتمالاتی را با فرض توزیع طبیعی داشتن انجام می دهد. [ ۲]
تهیه اطلاعات پیوسته و گسسته به روز و دقیق در مورد مکان و سرعت یک شی معین فقط به کمک توالی مشاهدات در مورد موقعیت آن شی، که هر کدام شامل مقداری خطاست امکان پذیر است. این فیلتر در طیف گسترده ای از کاربری های مهندسی از رادار گرفته تا بینایی رایانه ای کاربرد دارد. روش فیلتر کالمن یکی از عناوین مهم در تئوری کنترل و مهندسی سیستم های کنترلی می باشد.
به عنوان مثال، برای کاربری آن در رادار، آنجا که علاقه مند به ردیابی هدف هستید، اطلاعات در مورد موقعیت، سرعت و شتاب هدف با حجم عظیمی از انحراف به لطف پارازیت در هر لحظه اندازه گیری می شود. فیلتر کالمن از پویایی هدف بهره می گیرد به این صورت که سیر تکاملی آن را کنترل می کند، تا تأثیرات پارازیت را از بین ببرد و یک برآورد خوب از موقعیت هدف در زمان حال ( تصفیه کردن ) و در آینده ( پیش بینی ) یا در گذشته ( الحاق یا هموار سازی ) ارائه می دهد. یک نسخه ساده شده فیلتر کالمن، فیلتر آلفا بتا ( به انگلیسی: alpha beta filter ) ، که همچنان عموماً استفاده می شود از ثابت های static weighting به جای ماتریس های کواریانس استفاده می کند.



wiki: فیلتر کالمان