
رمزگذار چرخشی یک حسگر است که به آن شافت اینکودر ( به انگلیسی: Shaft Encoder ) نیز می گویند. رمزگذار چرخشی یک نوع دستگاه الکترومکانیکی است که وظیفه آن تبدیل موقعیت زاویه ای یک شفت ( به انگلیسی: Shaft ) به یک کد دیجیتال یا آنالوگ می باشد. به عبارت دیگر رمزگذار چرخشی یک مبدل ( به انگلیسی: Transducer ) زاویه ای است.
از جمله کاربردهای آن می توان به کاربرد در کنترل صنعتی، روباتیک و برآورده ساختن بعضی از هدف های لنزهای عکاسی و همچنین در دستگاه های ورودی رایانه نام برد.
به طور کلی رمزگذار چرخشی دارای دو فرم کلی مطلق و افزایشی می باشد که در ادامه خلاصه ای از آن ها توضیح داده می شود.
این واحد به ازای هر فاصله زاویه ای از شفت یک کد دیجیتالی تولید می کند، همچنین خاطر نشان می شود که رمزگذار چرخشی مطلق به دو فرم کلی مکانیکی و نوری تقسیم می شود
ساختمان ان به این نحو می باشد که یک دیسک فلزی که شامل تعدادی حلقه مجتمع بوده که خود ان به یک صفحه عایق ثابت شده اند دارای. یک ردیف از تماس های لغزنده ( sliding contacts ) که به جسم ثابت وصل شده اند است که در نتیجه هر تماس می تواند جداگانه ( در فاصله های متفاوت از شفت حرکت کند. هم زمان که دیسک به همراه شفت می چرخد بعضی از تماس ها توسط فلز لمس شده و بعضی در فضاهای خالی که از برش فلز به وجود امده اند می افتند باید ذکر شود که صفحه فلزی به جریان الکتریکی وصل بوده همچنین هر یک از تماس ها جداگانه به یک سنسور الکتریکی متصل هستند می توان دریافت که با در نظر گرفتن اینکه تماس ها با وصل بودن ( code=۱ ) و قطع بودن ( code=۰ ) الگوی مناسب دودویی برای تبدیل موقعیت زاویه ای یک شفت به یک کد دیجیتال ایجاد می کند.
در این حالت دیسک از شیشه یا پلاستیک که شامل مکان های مات قابل حرکت می باشند ساخته شده بدین ترتیب الگوی موقعیت دیسک توسط یک منبع نور و سنسورهای نوری مشخص می شود که می تواند توسط یک دستگاه کنترلی مانند یک میکرو خوانده شود. دقت شود که در حالت آنالوگ توسط الگوریتم های مشخصی از سیگنال تولیدی آنالوگ به موقعیت زاویه ای شفت رسید.
در جدول بالا مشاهده می شود به ازای سه تماس موجود ۳^۲ حالت مجزا برای موقعیت زاویه ای شفت وجود دارد ( در حالت کلی n contact , ۲^n position ) با چرخش دیسک contactها کد باینری برای مشخص کردن موقعیت ایجاد می کند با این وجود اگر دیسک بین دو همسایه جدول بایستد یا contactها به خوبی طراز نگردد امکان مشخص کردن زاویه شفت وجود ندارد برای مثال فرض کنید که شفت از بخش ۴ به بخش ۵ تغییر مکان ذاده بنابراین الگوی مورد نظر از off - on - onبه on - off - off تغییر می کند در صورتی که در عمل این اتفاق نمی افتد. دقت شود که تماس ها به خوبی هم ردیف نمی شود از این رو هر کدام در زمان متفاوتی سویچ می شوند برای مثال یک حالت به این صورت می باشد: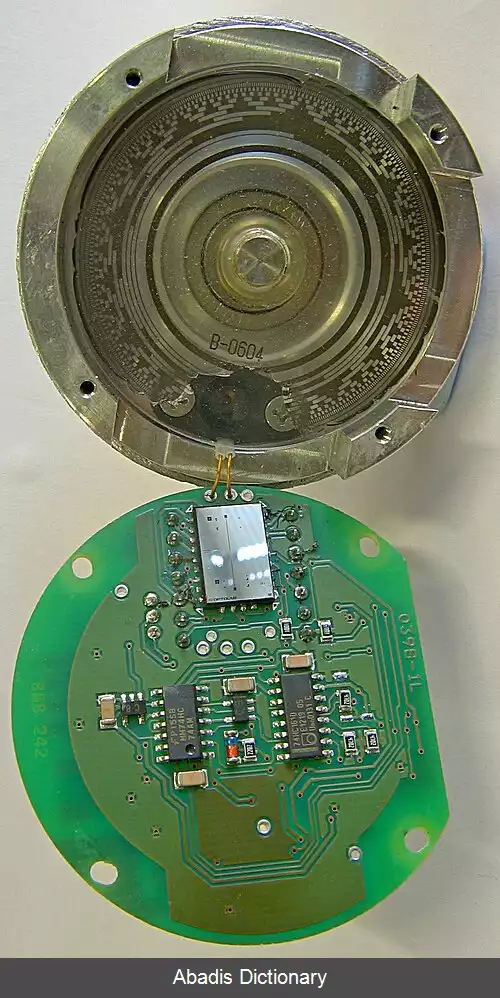
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفاز جمله کاربردهای آن می توان به کاربرد در کنترل صنعتی، روباتیک و برآورده ساختن بعضی از هدف های لنزهای عکاسی و همچنین در دستگاه های ورودی رایانه نام برد.
به طور کلی رمزگذار چرخشی دارای دو فرم کلی مطلق و افزایشی می باشد که در ادامه خلاصه ای از آن ها توضیح داده می شود.
این واحد به ازای هر فاصله زاویه ای از شفت یک کد دیجیتالی تولید می کند، همچنین خاطر نشان می شود که رمزگذار چرخشی مطلق به دو فرم کلی مکانیکی و نوری تقسیم می شود
ساختمان ان به این نحو می باشد که یک دیسک فلزی که شامل تعدادی حلقه مجتمع بوده که خود ان به یک صفحه عایق ثابت شده اند دارای. یک ردیف از تماس های لغزنده ( sliding contacts ) که به جسم ثابت وصل شده اند است که در نتیجه هر تماس می تواند جداگانه ( در فاصله های متفاوت از شفت حرکت کند. هم زمان که دیسک به همراه شفت می چرخد بعضی از تماس ها توسط فلز لمس شده و بعضی در فضاهای خالی که از برش فلز به وجود امده اند می افتند باید ذکر شود که صفحه فلزی به جریان الکتریکی وصل بوده همچنین هر یک از تماس ها جداگانه به یک سنسور الکتریکی متصل هستند می توان دریافت که با در نظر گرفتن اینکه تماس ها با وصل بودن ( code=۱ ) و قطع بودن ( code=۰ ) الگوی مناسب دودویی برای تبدیل موقعیت زاویه ای یک شفت به یک کد دیجیتال ایجاد می کند.
در این حالت دیسک از شیشه یا پلاستیک که شامل مکان های مات قابل حرکت می باشند ساخته شده بدین ترتیب الگوی موقعیت دیسک توسط یک منبع نور و سنسورهای نوری مشخص می شود که می تواند توسط یک دستگاه کنترلی مانند یک میکرو خوانده شود. دقت شود که در حالت آنالوگ توسط الگوریتم های مشخصی از سیگنال تولیدی آنالوگ به موقعیت زاویه ای شفت رسید.
در جدول بالا مشاهده می شود به ازای سه تماس موجود ۳^۲ حالت مجزا برای موقعیت زاویه ای شفت وجود دارد ( در حالت کلی n contact , ۲^n position ) با چرخش دیسک contactها کد باینری برای مشخص کردن موقعیت ایجاد می کند با این وجود اگر دیسک بین دو همسایه جدول بایستد یا contactها به خوبی طراز نگردد امکان مشخص کردن زاویه شفت وجود ندارد برای مثال فرض کنید که شفت از بخش ۴ به بخش ۵ تغییر مکان ذاده بنابراین الگوی مورد نظر از off - on - onبه on - off - off تغییر می کند در صورتی که در عمل این اتفاق نمی افتد. دقت شود که تماس ها به خوبی هم ردیف نمی شود از این رو هر کدام در زمان متفاوتی سویچ می شوند برای مثال یک حالت به این صورت می باشد:

wiki: رمزگذار چرخشی