
بازوهای مکانیکی ( Manipulator ) از رابط های صلبی تشکیل می شوند که به وسیلهٔ مفصل هایی که حرکت نسبی رابط های مجاور را ممکن می سازند، به یکدیگر اتصال یافته اند. بازوهای مکانیکی توانایی انجام عملیات از پیش برنامه ریزی شدهٔ متنوعی را در صنایع مختلف دارند. [ ۱] [ ۲] بازوهای مکانیکی ماهر در طی سال های اخیر به شکل قابل ملاحظه ای تکمیل یافته و پیشرفت کرده اند. کار کردن با آن ها و نیز تعمیر و نگهداری شان آسان تر شده و ارتباط متناسب و بهینه ای میان توان، کنترل پذیری و مهارت آن ها ایجاد گشته است.
در انتهای زنجیره رابط های تشکیل دهنده بازوی مکانیکی مجری نهایی وجود دارد که بر حسب کاربردی که از ربات انتظار می رود می تواند گیره یا چنگک یا ابزارهای دیگری از جمله لوازم برشکاری، جوشکاری و نظیر آن باشد. از این لحاظ بازوهای مکانیکی ماهر متنوعی وجود دارند که گونه های وسیعی و متفاوتی از کاربردهای صنعتی و نیز تحقیقاتی را را پوشش می دهند. این کاربردها شامل انجام فعالیت های متنوع مونتاژ، برشکاری و جوشکاری در خطوط تولید تا انجام عملیات متنوع زیرآبی – نظیر نصب در ربات زیرآبی - مانند گرفتن و دنبال کردن کابل یا سیم، یا محبوس کردن اجسام یا نمونه های پیچیده ای چون برقراریِ اتصال های خطوط الکتریکی یا هیدرولیکی هستند.
در انتخاب بازوهای مکانیکی آنچه اهمیت دارد این است که ساده ترین نمونهٔ ممکن که بتواند وظیفه محوله را در زمان مطلوب انجام دهد، گزینش گردد. پیچیدگی طراحی ربات در عین افزایش قابلیت های عملکرد می تواند مشکلاتی در کنترل، هدایت و نیز اطمینان و دقت دستگاه و نیز تعمیر و نگهداری آن ایجاد نماید. انتخاب و تکمیل مجموعه بازوهای مکانیکی ماهر امر پیچیده ای است و طراح ربات باید نکات فراوانی را لحاظ نماید. تعداد و انواع بازوهای مورد نیاز، محل قرارگیری، نوع کنترلر، محدودهٔ فضای عملکرد، حداکثر و حداقل نقطه دست رسی و نوع و ساختار کنترل بازوها توسط کاربر، از آن جملهٔ این موارد است.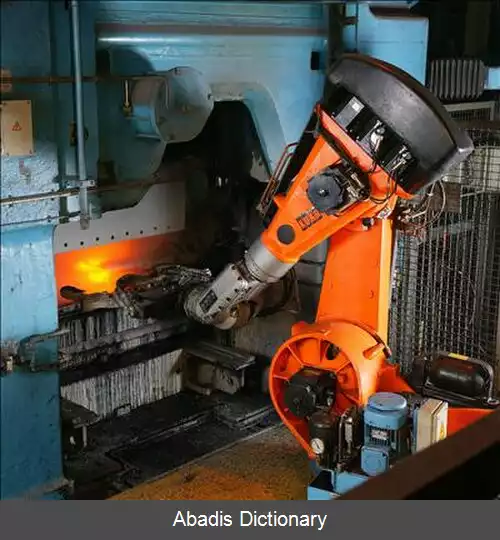

این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفدر انتهای زنجیره رابط های تشکیل دهنده بازوی مکانیکی مجری نهایی وجود دارد که بر حسب کاربردی که از ربات انتظار می رود می تواند گیره یا چنگک یا ابزارهای دیگری از جمله لوازم برشکاری، جوشکاری و نظیر آن باشد. از این لحاظ بازوهای مکانیکی ماهر متنوعی وجود دارند که گونه های وسیعی و متفاوتی از کاربردهای صنعتی و نیز تحقیقاتی را را پوشش می دهند. این کاربردها شامل انجام فعالیت های متنوع مونتاژ، برشکاری و جوشکاری در خطوط تولید تا انجام عملیات متنوع زیرآبی – نظیر نصب در ربات زیرآبی - مانند گرفتن و دنبال کردن کابل یا سیم، یا محبوس کردن اجسام یا نمونه های پیچیده ای چون برقراریِ اتصال های خطوط الکتریکی یا هیدرولیکی هستند.
در انتخاب بازوهای مکانیکی آنچه اهمیت دارد این است که ساده ترین نمونهٔ ممکن که بتواند وظیفه محوله را در زمان مطلوب انجام دهد، گزینش گردد. پیچیدگی طراحی ربات در عین افزایش قابلیت های عملکرد می تواند مشکلاتی در کنترل، هدایت و نیز اطمینان و دقت دستگاه و نیز تعمیر و نگهداری آن ایجاد نماید. انتخاب و تکمیل مجموعه بازوهای مکانیکی ماهر امر پیچیده ای است و طراح ربات باید نکات فراوانی را لحاظ نماید. تعداد و انواع بازوهای مورد نیاز، محل قرارگیری، نوع کنترلر، محدودهٔ فضای عملکرد، حداکثر و حداقل نقطه دست رسی و نوع و ساختار کنترل بازوها توسط کاربر، از آن جملهٔ این موارد است.


wiki: بازوی مکانیکی