
آسکارا. آسکارا ( به اسپانیایی: Áscara ) یک منطقهٔ مسکونی در اسپانیا است که در استان اوئسکا واقع شده است. [ ۱] آسکارا ۵۷ نفر جمعیت دارد و ۷۳۲ متر بالاتر از سطح دریا واقع شده است.

wiki: آسکارا
اسکارا ( به انگلیسی SCARA ) مخفف عبارت Selective Compliance Assembly Robot Arm یا Selective Compliance Articulated Robot Arm نوعی بازوی رباتیک است.
در سال 1981، سانکیو سایکی ( به انگلیسی Sankyo Seiki ) ، Pentel و NEC یک مهفوم کاملاً جدید برای ربات های مونتاژ ارائه کردند. این ربات تحت هدایت هیروشی ماکینو ( به انگلیسی Hiroshi Makino ) ، استاد دانشگاه یاماناشی ( به انگلیسی University of Yamanashi ) ی Pentel و NEC ارائه یک مفهوم کاملاً جدید برای مونتاژ روبات. ربات توسعه داده شد تحت هدایت هیروشی Makino یک استاد در دانشگاه Yamanashi. ربات نامیده می شد انتخابی انطباق مونتاژ بازوی ربات های SCARA. آن بازوی سفت و سخت بود در محور Z و قابل انعطاف در XY - محور اجازه داده است که آن را برای انطباق با سوراخ در XY - محور. [ ۱] [ ۲]
ربات های اسکارا از ربات های دکارتی سریع تر هستند. تک پایه ای که روبات های اسکارا روی آن قرار می گیرند به فضای کمی نیاز دارد و عمل اتصال ربات را آسان می نماید. از سوی دیگر ربات های اسکارا در مقایسه با ربات های دکارتی همتراز، گرانتر هستند و نرم افزار کنترل کننده آن ها به inverse kinematics برای حرکات linear interpolated نیاز دارد. نرم افزار کنترل کننده معمولاً همراه ربات وجود دارد.
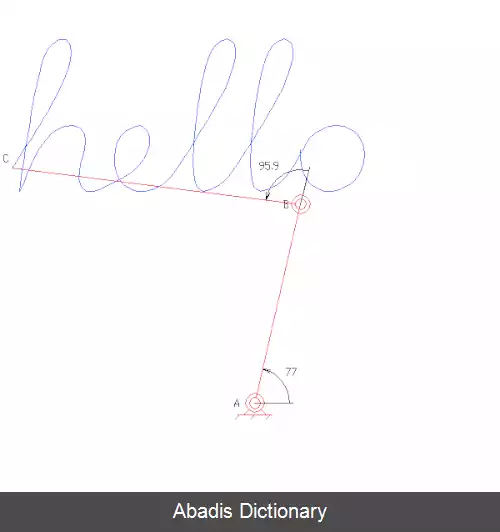
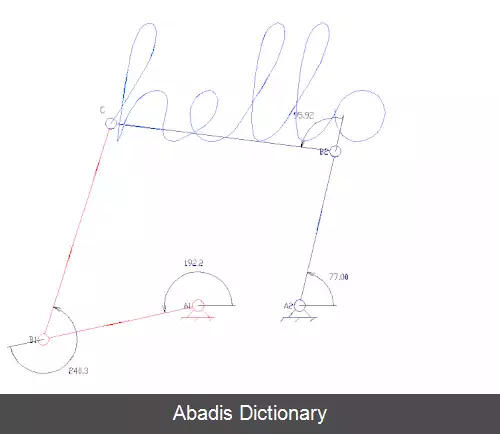
بیشتر ربات های اسکارا بر اساس معماری سریال ساخته شده اند، بدین معنی که موتور اول سایر موتورها را حمل می نماید. البته مدل با دو پایه متحرک هم برای اسکارا وجود دارد. اولین ربات اسکارای تجاری توسط شرکت Mitsubishi Electronics ساخته شد. مثال دیگری از ربات اسکارا دو بازویه، ربات آموزشی Mecademic's DexTAR است. [ ۳]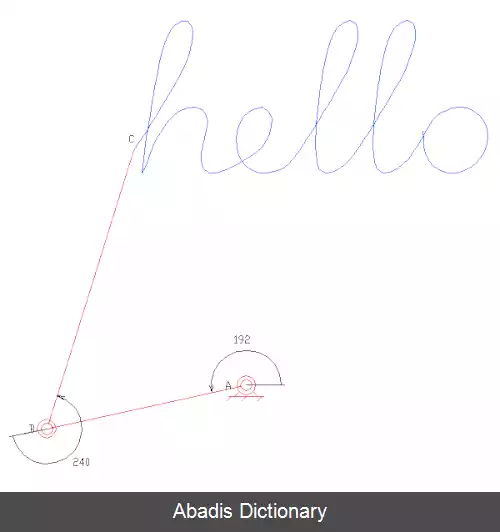
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفدر سال 1981، سانکیو سایکی ( به انگلیسی Sankyo Seiki ) ، Pentel و NEC یک مهفوم کاملاً جدید برای ربات های مونتاژ ارائه کردند. این ربات تحت هدایت هیروشی ماکینو ( به انگلیسی Hiroshi Makino ) ، استاد دانشگاه یاماناشی ( به انگلیسی University of Yamanashi ) ی Pentel و NEC ارائه یک مفهوم کاملاً جدید برای مونتاژ روبات. ربات توسعه داده شد تحت هدایت هیروشی Makino یک استاد در دانشگاه Yamanashi. ربات نامیده می شد انتخابی انطباق مونتاژ بازوی ربات های SCARA. آن بازوی سفت و سخت بود در محور Z و قابل انعطاف در XY - محور اجازه داده است که آن را برای انطباق با سوراخ در XY - محور. [ ۱] [ ۲]
ربات های اسکارا از ربات های دکارتی سریع تر هستند. تک پایه ای که روبات های اسکارا روی آن قرار می گیرند به فضای کمی نیاز دارد و عمل اتصال ربات را آسان می نماید. از سوی دیگر ربات های اسکارا در مقایسه با ربات های دکارتی همتراز، گرانتر هستند و نرم افزار کنترل کننده آن ها به inverse kinematics برای حرکات linear interpolated نیاز دارد. نرم افزار کنترل کننده معمولاً همراه ربات وجود دارد.
بیشتر ربات های اسکارا بر اساس معماری سریال ساخته شده اند، بدین معنی که موتور اول سایر موتورها را حمل می نماید. البته مدل با دو پایه متحرک هم برای اسکارا وجود دارد. اولین ربات اسکارای تجاری توسط شرکت Mitsubishi Electronics ساخته شد. مثال دیگری از ربات اسکارا دو بازویه، ربات آموزشی Mecademic's DexTAR است. [ ۳]





wiki: اسکارا